Adding a New Robot
1. Preparing the Configuration File Archive
Using OpenLoong as an example:
Prepare the URDF and model files for OpenLoong. You need to write configuration files according to the tutorial below and place them in the first level of the OpenLoong path, including:
| Filename | Option | Detailed Documentation |
|---|---|---|
vr_configs.yml | (Required) | Writing the Main Configuration File |
controller_v2.yml | (Optional) | Writing the Controller Configuration File |
mocap_to_robot_command_v2.yml | (Optional) | Writing the Motion Capture Mapping Configuration File |
After completion, package the OpenLoong folder to create a zip archive OpenLoong.zip.
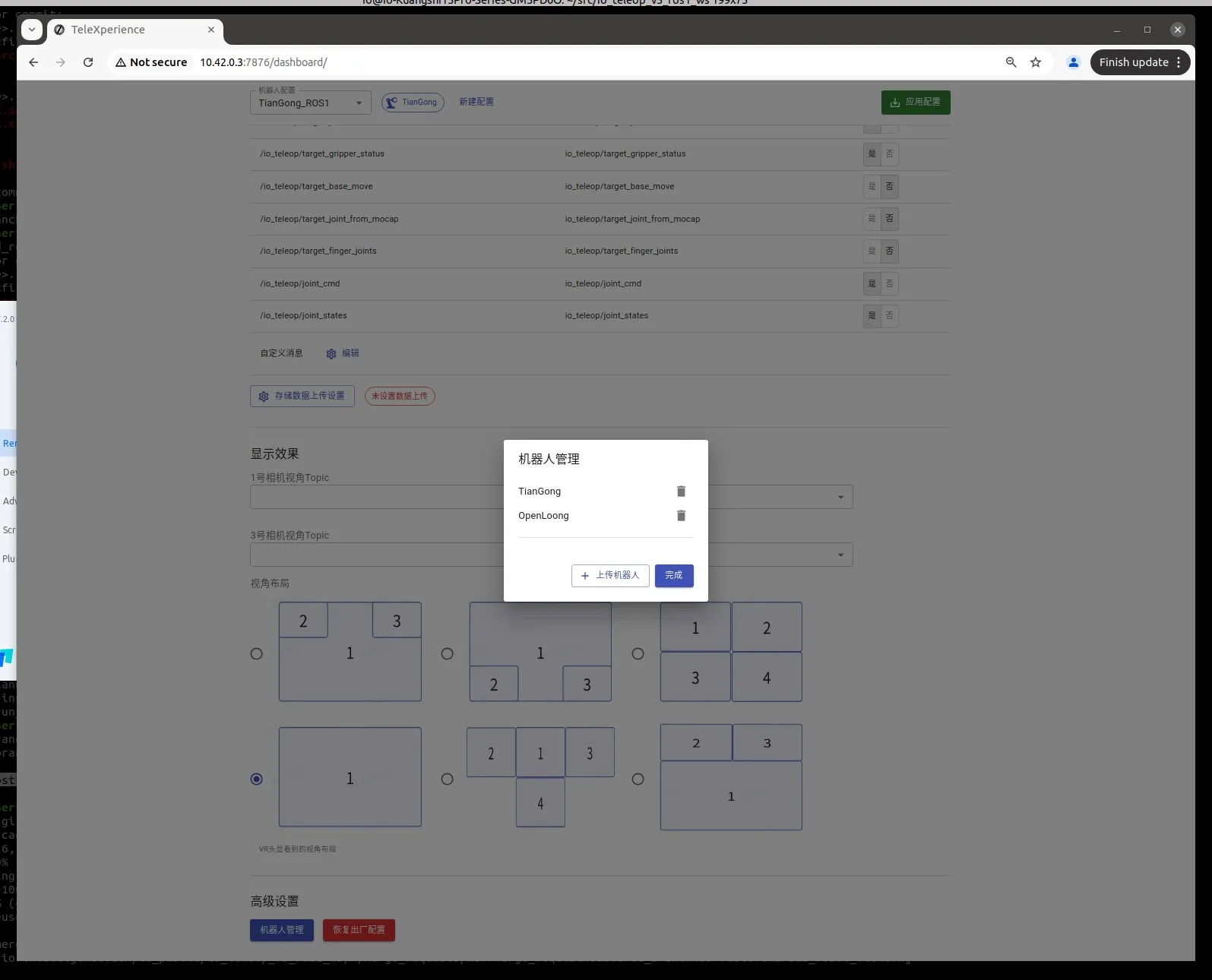
2. Uploading the Configuration File Archive
After starting TeleSuit and TeleBox, connect the industrial computer's Wi-Fi to Y2_5G_xxxx, open the browser, and enter 10.42.0.3:7876 in the address bar to access the configuration page.
At the bottom of the webpage, find Robot Management. Enter it, select Upload New Robot, and choose the corresponding robot's zip archive to upload.
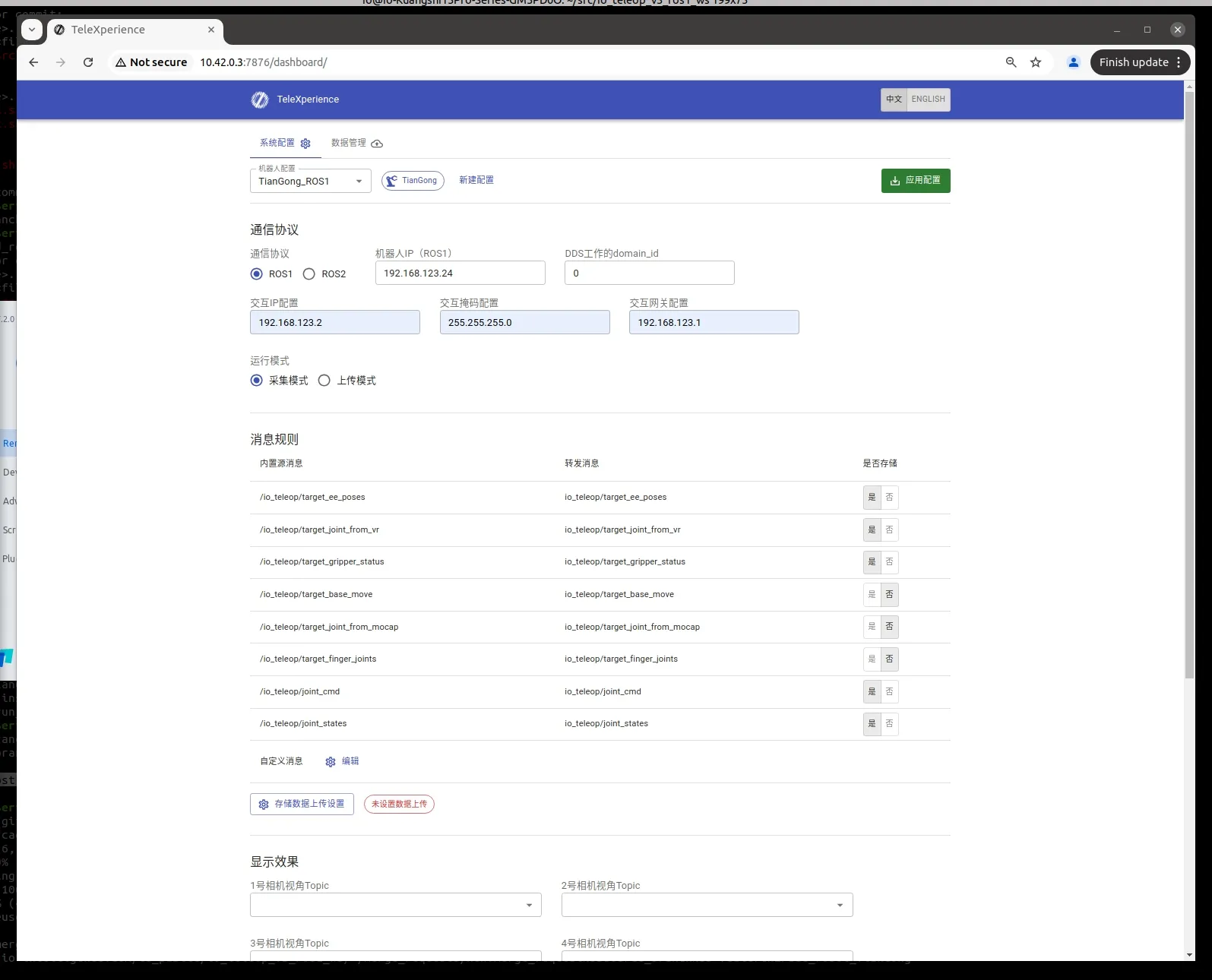
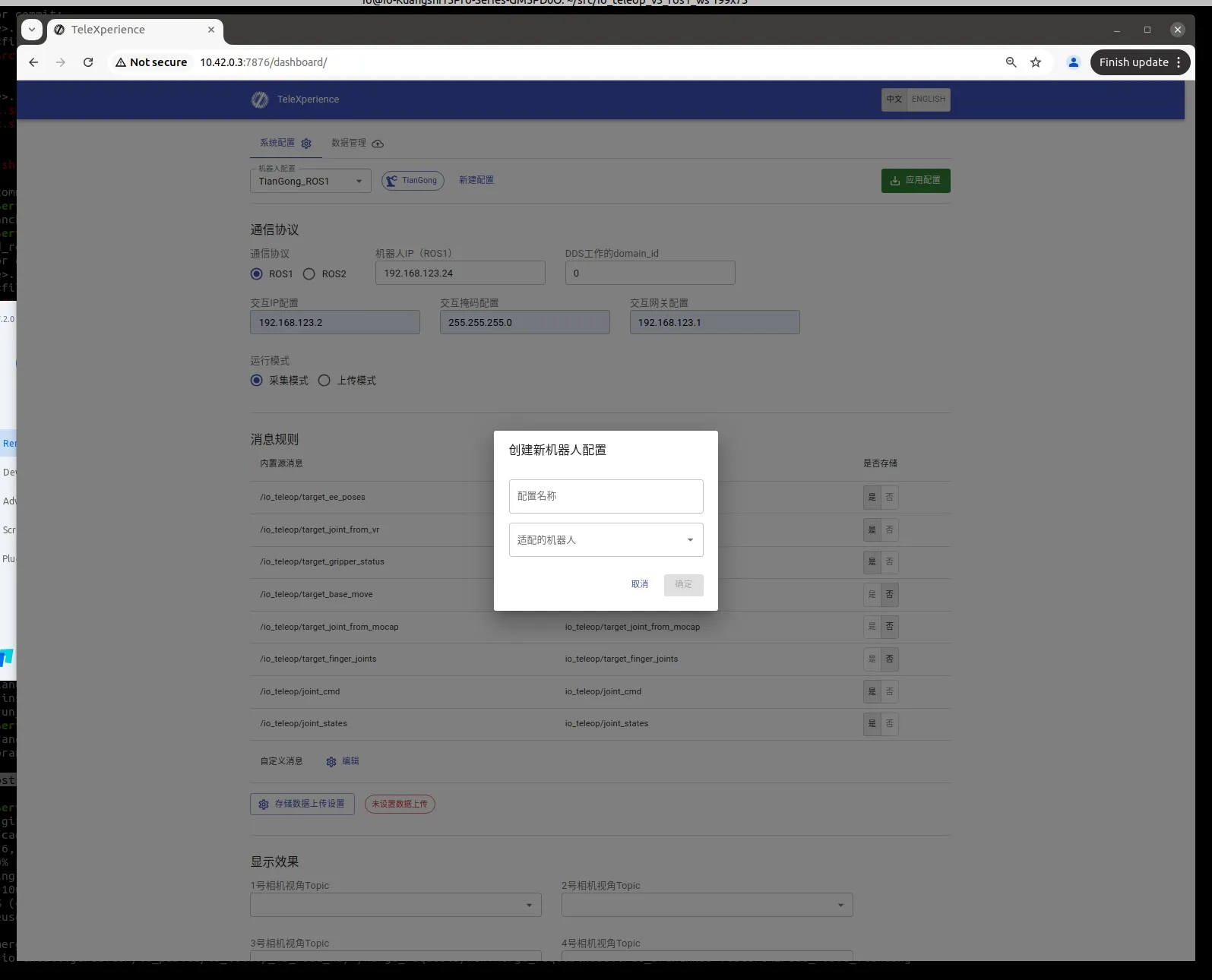
3. Configuring the Robot's IP
At the top of the webpage, click New Configuration. After Uploading the Configuration File Archive, you should find the uploaded robot under the Adapted Robots option. Select it, customize the configuration name (usually 'RobotName'_ROS1/2'), and then click Confirm.
Under Communication Protocol, select ROS1, choose Gathering Mode as the operation mode, and set the robot's IP, domain_id, gateway, etc.
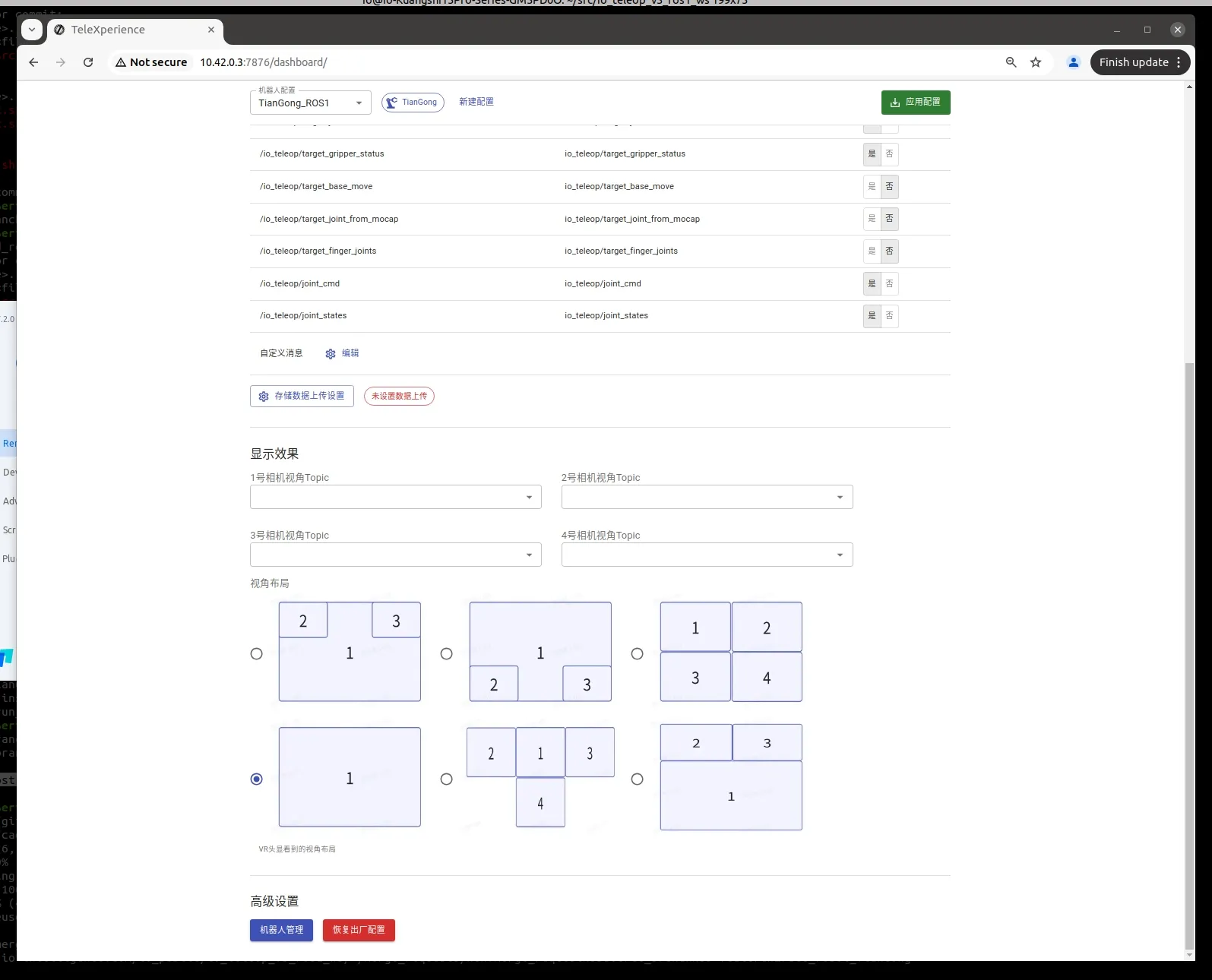
In Display Effects, select the view layout according to your needs.
4. Implementing VR Simulation Control
After completing all the steps, the new robot is added to the TeleExperience system. After writing the ROS node, you can achieve VR control of the simulated robot on the industrial computer.
First, start two terminals and change the industrial computer's IP to correspond with the content in Configuring the Robot's IP.
export ROS_IP=192.168.123.24
export ROS_MASTER_URI=http://192.168.123.24:11311
export ROS_DOMAIN_ID=0
In one terminal, start roscore, and in the other terminal, start the ROS node. In the VR headset, click start teleop to achieve VR control of the simulated robot.
Implementing Real Robot Control
To control a real robot, you need to replace the corresponding real robot control interface on the industrial computer node.