Robotics & Embodied AI
Bringing robots
everywhere, for everyone
IO-AI Tech is a global leader in real-world robotics and embodied AI data solutions. Our proprietary integrated hardware and software is purpose-built for scalable, high-quality, and customizable training data, empowering the development of cutting-edge physical AI.
Our Clients
Our Products
End-to-end solutions for robotics and embodied AI
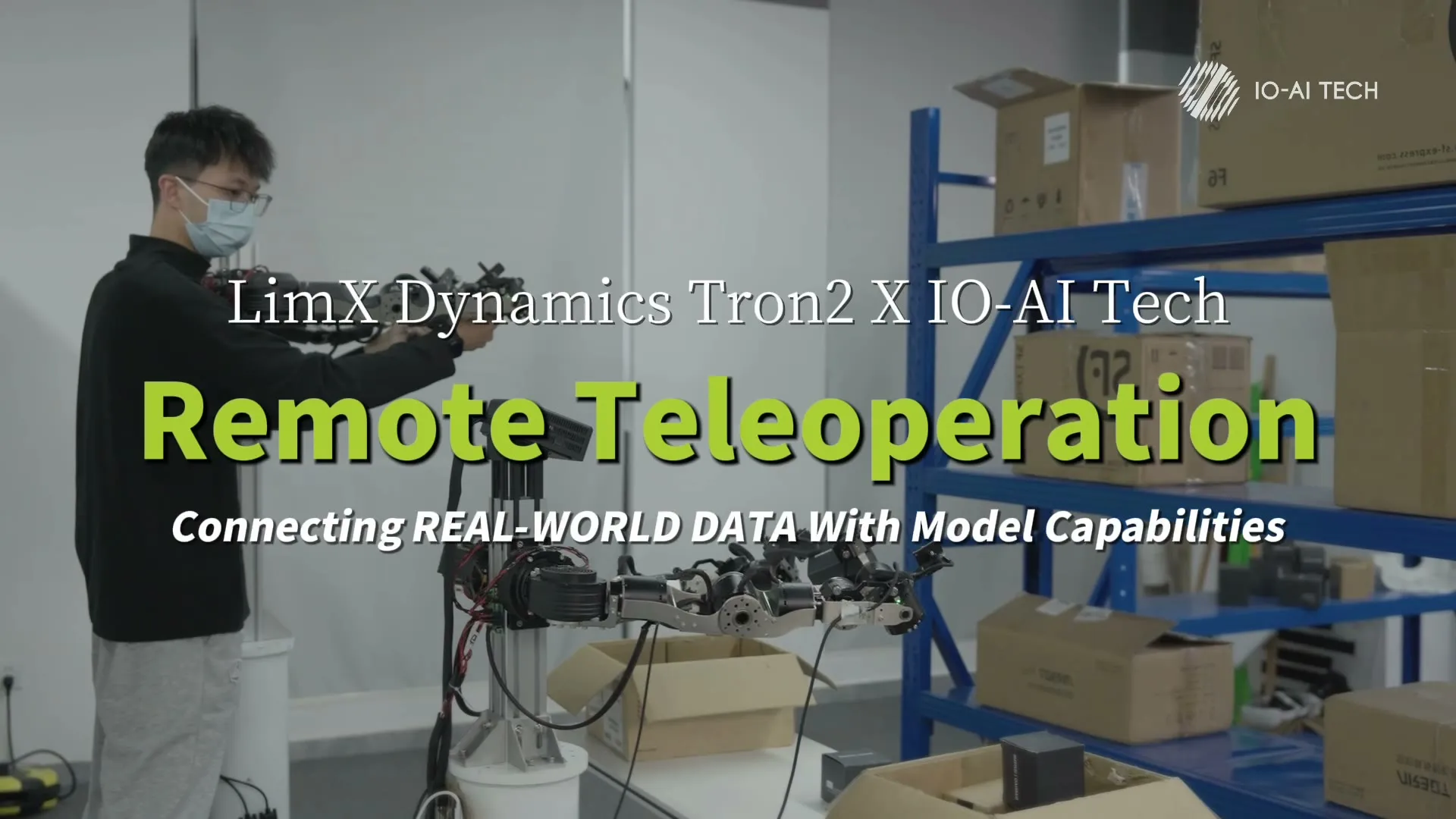
Robot teleoperation platform
TeleXperience
General robot teleoperation platform allowing humans to control any robot configuration. Collect high-precision real-world robot data for training and deploying humanoids, robot arms, or dexterous hands.
Learn moreReal-world human data
SenseXperience
Capture high-quality, real-world human data. Egocentric unit, customizable UMI, and full-body sensor and motion capture, integrated with our powerful post-processing algorithms, for scalable, high-precision human data.
Learn moreData platform & agent lab
EmbodiFlow
Custom-built embodied AI data platform. Supports high-complexity multimodal data collection, annotation, visualization, quality assurance, and post-processing algorithms.
Learn moreCase studies
More case studies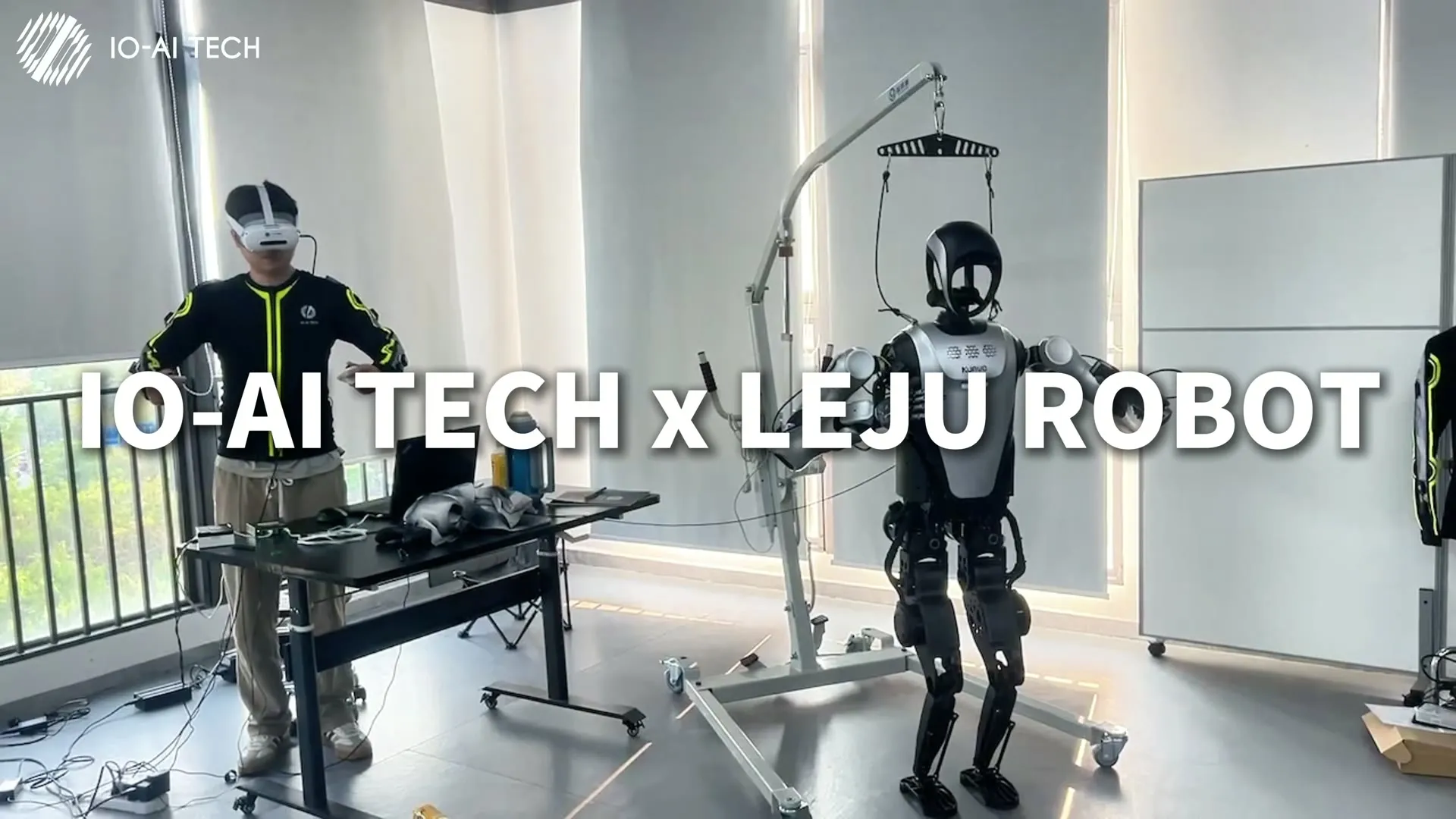


Resources
Product documentation
Latest updates
More newsIO-AI Tech, May 2026 Update: Open-Sourcing of ROSView, Ecosystem Participation, and Real-World Deployment
Throughout the month, IO AI Tech made progress across open sourcing ROSView, global ecosystem participation, industry knowledge sharing, real world deployment, academic collaborati...
IO-AI Open Source ROSView: An Offline Visualization Tool for Embodied Intelligence Data
Supports visualization of multiple formats in the robotics field such as mcap, bag, db3, hdf5, bvh, etc., with pure browser side parsing without uploading, providing an open and re...
IO-AI Tech, April 2026 Update: Industry Recognition, Ecosystem Participation, and International Exchange
Learn how IO AI Tech advanced its real world data infrastructure during April 2026 across industry conferences, ecosystem partnerships, technical demonstrations, and international...
Built by robotics and AI experts
IO-AI was founded in 2023 with the vision of bringing robots everywhere, for everyone. Our goal is to provide the leading data infrastructure for robotics and embodied AI, partnering closely with our customers to advance frontier models and accelerate real-world deployment.
Our founding team brings deep experience in robotics and AI from leading global technology companies, automotive and drone innovators, cloud platforms, and industrial automation—spanning research labs, large-scale products, and real-world deployment.
Get in touch
Office address
- OfficesShenzhen (CN), Osaka (JP), Singapore (SG), Sydney (AU), San Francisco (US)