了解TeleXperience系统
若您希望将TeleXperience应用于您自己的机器人,并自行完成适配工作,请参考本章节的相关内容。
服务说明
进阶开发过程不在官方售后的支持范围内,适配过程中遇到的问题需您自行解决。您可以提交问题表单,我们会尽力提供建议,但无法保证响应时效或具体解决方案。
若您在适配过程中遇到无法解决的问题,欢迎联系您的销售代表购买适配服务,我们的专业团队将为您提供定制化支持,确保您的机器人顺利完成适配。
另外请您注意,目前自行适配有以下限制:
- 灵巧手:不支持每根手指独立运动的适配,可支持全部手指的同时开合
- 不支持在VR APP中可视化机器人模型及实时同步机器人运动
网络拓扑图
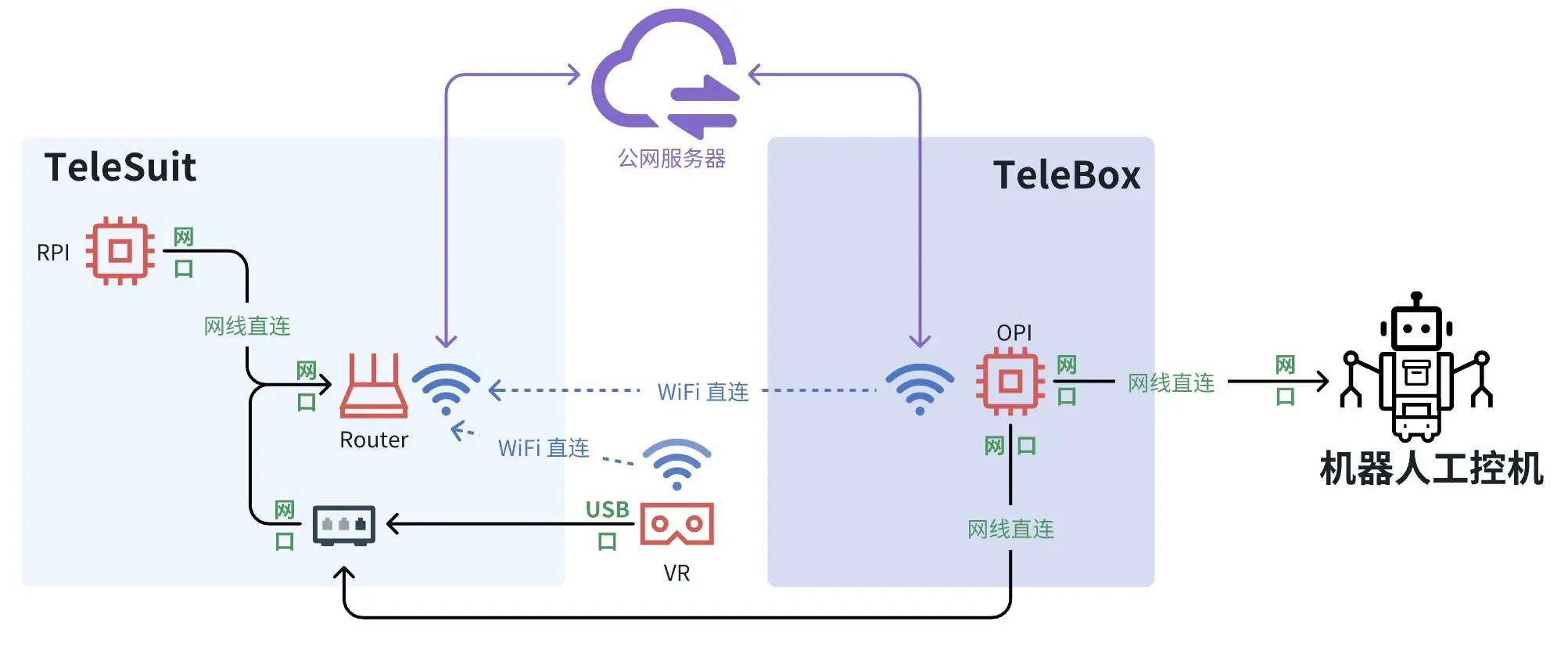
对于TeleSuit与TeleBox之间可以通过以下三种方式建立通信连接:
- 有线网直连
- Wi-Fi直连
- 通过公网服务器,实现跨网络传输,远程遥操作(待上线)
对于TeleSuit与VR,可以通过以下两种方式建立通信连接:
- Wi-Fi直连
- 有线网直连(专业版及以上)
ROS话题列表
在TeleXperience内部有若干ROS2话题,您可以订阅这些消息来进行二次开发
| 话题 | 消息类型 | 内容介绍 |
|---|---|---|
/io_teleop/joint_states | sensor_msgs/JointState | 由机器人工控机发出的关节位置反馈 |
/io_teleop/target_ee_poses | geometry_msgs/PoseArray | 机械臂末端的期望位姿 |
/io_teleop/joint_cmd | sensor_msgs/JointState | 机械臂(腰)的期望关节位置 |
/io_teleop/target_gripper_status | sensor_msgs/JointState | 夹爪的期望开合状态 |
/io_teleop/target_base_move | std_msgs/Float64MultiArray | 底盘的期望运动速度 |
/io_teleop/target_finger_joints | sensor_msgs/JointState | 灵巧手的期望手指关节角 |
/io_teleop/target_joint_from_vr | sensor_msgs/JointState | 头、升降躯干的期望关节位置 |
/io_teleop/target_joint_from_mocap | sensor_msgs/JointState | 由动捕给出的关节角优化参考 |
/io_teleop/vibration_feedback | std_msgs/Float64MultiArray | 手柄的震动反馈 |
/io_teleop/vr_data | io_msgs2/VrData | VR头显与手柄消息 |
/mocap/sensor_data | io_msgs2/SquashedMocapData | 动捕信息 |
/io_fusion/tf | tf2_msgs/TFMessage | 由动捕消息计算出的TF |
其中,io_msgs2 为艾欧�定义的消息类型,您可以通过以下路径访问到原始文件:
ssh orangepi@10.42.0.3 # password:123456
cd /teleopbox_app/ros_ws/src/io_msgs2