软件升级
TeleXperience 软件正在持续迭代中,以不断提升系统稳定性与扩展功能,为您提供更丰富、更可靠��的遥操作体验。 如需进行软件更新,请联系您的销售代表,获取软件升级包及安装工具。
设备访问与数据包传输
登录设备
连接至TeleSuit
# 密码:123456
ssh io@10.42.0.2
连接至TeleBox
# 密码:123456
ssh orangepi@10.42.0.3
拷贝数据包
传输文件到TeleSuit
# 密码:123456
scp ${your_data_path} io@10.42.0.2:/home/io
传输文件到TeleBox
# 密码:123456
scp ${your_data_path} orangepi@10.42.0.3:/home/orangepi
更新安装工具
参考设备访问与数据包传输,拷贝安装包到目标设备中。
卸载旧版本:
sudo dpkg -r io-dev-updator
安装新版本(示例):
sudo dpkg -i io_dev_updator_vx.x.x.deb
软件包更新
适用软件包:io_teleop_v3,teleopbox_app,io_teleop_robot_descriptions等组件。
在浏览器中访问安装工具 Web 页面 io-dev-updator:
- 根据设备 IP 地址确定访问网址,例如:http://10.42.0.2:5000
- 在页面中点击选择文件按钮,指定要上传的程序包;
- 点击上传并安装启动安装流程。

二代TeleSuit设备安装docker软件(需要联网)
注意:不要在stable模式下安装
更新系统源
sudo apt update
如更新失败,请执行以下命令清理源并重新更新:
sudo rm /etc/apt/sources.list.d/ros-latest.list
sudo rm -rf /var/lib/apt/lists/*
sudo apt clean
sudo curl -fsSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key | sudo gpg --dearmor -o /usr/share/keyrings/ros-archive-keyring.gpg
sudo apt update
安装Docker及依赖
sudo apt install -y docker.io pigz fuse-overlayfs
### 创建 docker 组
sudo groupadd docker # 将当前用户添加到 docker 组
sudo usermod -aG docker $USER
### 应用组更改(或重新登录)
newgrp docker
配置 Docker 守护进程,创建或编辑 /etc/docker/daemon.json:
sudo mkdir -p /etc/docker
sudo nano /etc/docker/daemon.json
添加以下配置:
{
"storage-driver": "fuse-overlayfs"
}
保存后启动 Docker 服务:
sudo systemctl enable docker
sudo systemctl restart docker
旧版TeleBox安装导入docker镜像所需的依赖
在线安装
首次使用Docker版本时,请连接至TeleBox并执行:
sudo apt install pv pigz -y
离线安装
注意:请联系销售代表获取安装包。
参考传输文件到TeleBox,将安装包拷贝到box中,并按照以下命令进行安装。
sudo dpkg -i pigz_2.6-1_arm64.deb
sudo dpkg -i pv_1.6.6-1build2_arm64.deb
docker镜像导入与管理
调试机环境准备
注意:请不要在telesuit的stable环境下更新
安装所需依赖
sudo apt install pv pigz -y
检查目标机器剩余存储空间
参考登录设备,连接目标设备并执行:
df -h
请确保根目录(/)可用空间 不少于 5GB。 如空间不足,可通过清理旧版 Docker 镜像释放空间:
docker images # 查看docker镜像列表
teleop-docker stop # 停止遥操作服务(如需)
docker rmi <镜像ID> # 删除指定镜像
传输并加载Docker镜像
在调试机上执行:
time pv xxxxxxxx-image-xxxxxxxx.tar.gz | ssh ${user}@${ip} "pigz -dc - | docker load"
建议等待时间:
- 有线连接:约 3–5 分钟
- 无线连接:约 5–10 分钟
TeleSuit
time pv io_teleop_v3-image-xxxxxxxx.tar.gz | ssh io@10.42.0.2 "pigz -dc - | docker load"
TeleBox
time pv teleopbox_app_image-xxxxxxxx.tar.gz | ssh orangepi@10.42.0.3 "pigz -dc - | docker load"
常见问题
安装失败,提示空间不足
参考检查目标机器根目录下是否有足够的剩余空间进行清理后重试。

提示依赖缺失
参考旧版TeleBox安装导入docker镜像所需的依赖安装后重试。

更新VR App
- 将 VR 连接至电脑,打开 VR 根目录,将要升级的 apk 文件放置在根目录。
- 在 VR 里打开文件管理。

- 在侧边栏选择安装包,然后点击要安装的 apk 文件,选择安装。



- 安装完成后,点击完成。
- 点击资源库,点击未知来源。


- 选择刚安装的文件,点击打开,即可进入。

嵌软升级
本章节说明如何通过浏览器将遥操作设备的嵌软版本从 V2 更新至 V3,或从 V3 回退至 V2。整个过程在网页前端完成,安装日志里会显示进度。遇到问题时,请保存日志并联系技术支持。
升级和降级分别是什么?
| 您要做的 | 需要使用的安装包(文件名示例) | 说明 |
|---|---|---|
| 升级 | embedded_upgrade_0.7.0.zip(数字版本号以您拿到的为准) | 把整套设备从旧版固件(V2) 升到新版固件(V3) |
| 降级 | embedded_downgrade_0.7.0.zip(数字版本号以您拿到的为准) | 从新版固件(V3)回退到旧版固件(V2) |
注意事项
- 更新前确认已连接好动捕 HUB:请检查动捕 HUB 已连接至套装里的主控。没有 HUB,更新无法进行。
- 更新前请确认所有需要更新的设备均已连接好并打开电源:包括动捕服、左/右惯捕手套、左/右外骨骼手套等。
- 无线外骨骼手套:请使用有线连接方式进行更新。
- 更新过程中请耐心等待,中途打断可能导致失败。更新会改写设备内部程序并可能重启,更新过程中请不要关闭网页、不要断开电源、也不要断开设备连接线。
在网页上如何操作?
- 将电脑连接至 TeleSuit 的 Wi-Fi。
- 然后在浏览器打开:
http://10.42.0.2:5000,进入 「软件安装更新」 页面。 - 页面右上角 「网络连接正常」 仅表示浏览器与本地管理页服务之间的状态,不是更新能否进行的必要条件;未显示或暂时灰色时,仍可继续进行下一步。
- 点击 「选择文件」,选中官方给您的 升级包 或 降级包(.zip)。
- 点击 「上传并安装」,等待安装完成;安装过程中请不要关闭这个页面。
- 若安装失败:用日志旁边的 复制 或 下载,保存完整日志。
日志说明
- 日志中的 [0/8] 等数字:
- 表示升级的大阶段进度。
- 具体步骤及行为:
- 清点、刷写、写回失败:系统会自动进行重试。
- 优先顺序:同侧的外骨骼设备优先于手套进行处理。
- 目标版本检查:若设备已经达到目标版本,将跳过该步骤。
- 参数读取来源:
- 首次清点后,系统会检查主控上是否有参数备份:
- 升级时:尝试加载 old_hub_params.bin。
- 降级时:尝试加载 new_hub_params.bin。
- 续装逻辑:
- 如果主控上存在有效备份,则直接从文件载入(续装,日志中可见提示如「遗留内参」「跳过重新读取」)。
- 若无备份,则从设备通过 HUB 重新读取参数。
- 删除与跳过:
- 当参数读取成功后,系统通常会自动删除已使用的备份文件。
- 在某些特殊情况下(如 HUB ��版本问题或仅 HUB 场景),可能会跳过整段参数读取过程。
| 日志字样 | 含义 |
|---|---|
UPGRADE / DOWNGRADE | 升级 / 降级流程 |
[0/8]…[8/8] | 大阶段(刷写未必逐条标号) |
| 一致性校验通过/失败 | 在线设备与参数是否匹配 |
HUB-only | 仅更新 HUB |
| 遗留内参 / 跳过重新读取 | 从备份文件续装 |
| 重试 | 自动再试 |
| 验证成功/失败 | 单步结果 |
异常处理
现象: 安装失败,并且在日志中出现报错信息。 解决方法:
- 新建页面重新安装:在浏览器中新开一个页面重新进行安装操作,大部分问题(如通讯中断或硬件的概率性故障)可以通过重试解决。
- 收集日志信息:如果问题仍未解决,请保存首次安装和重试安装的日志信息。
- 检查 HUB 状态:确认 HUB 的指示灯状态,注意查看是否有红绿交替闪烁等异常情况。
- 联系技术支持:反馈两次操作的日志信息以及 HUB 指示灯的状态情况,寻求进一步支持。
外骨骼无线模块嵌软升级
- 升级脚本:esp32s3_flasher.py
- 未重构固件:WiFi_485_UDP_OTA_20251112_V08.bin
- 重构固件:RE_WiFi_485_UDP_OTA_20260428_V30.bin
- 合并单固件RE_WiFi_485_UDP_OTA_20260521_V31_Merge.bin
用法:
python esp32s3_flasher.py <端口> <固件.bin>
升级示例:
python esp32s3_flasher.py COM3 RE_WiFi_485_UDP_OTA_20260428_V30.bin
回退示例:
python esp32s3_flasher.py COM3 WiFi_485_UDP_OTA_20251112_V08.bin
注意事项:
- 需用USB电脑连接单独升级。

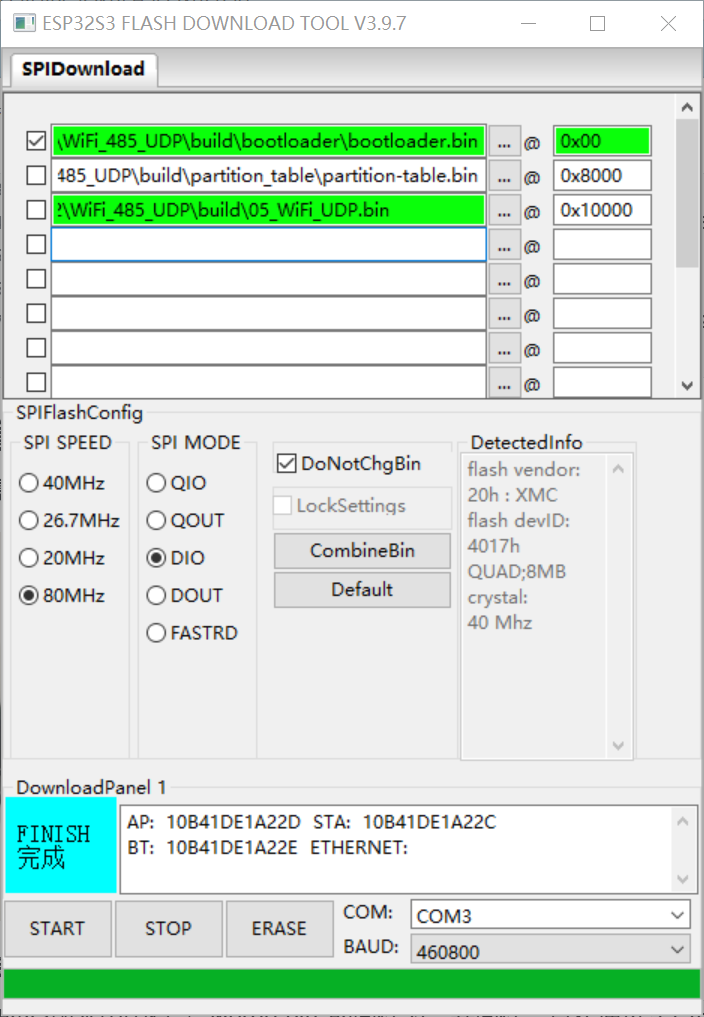
- 烧录固件问题 重构的V3版本中带有"*_Merge.bin"的固件为合并固件,直接通过flash_download_tool_3.9.7烧入0x0000地址即可。如果是未合并固件,分别要把构建好的三个固件按地址烧入,如:
| 路径 | 烧录地址 | 功能 |
|---|---|---|
*\build\bootloader\bootloader.bin | 0x00 | 引导程序 |
*\build\partition_table\partition-table.bin | 0x8000 | 分区程序 |
*\build\05_WiFi_UDP.bin | 0x10000 | 主程序 |
如遇到其他问题,请联系技术支持。