撰写主配置文件
1. 准备
请准备好机器人的URDF文件
接下来以OpenLoong为例,介绍如何构造配置文件。
确认URDF可用
在OpenLoong路径下,使用以下python3脚本测试:
import pybullet as p
import time
p.connect(p.GUI)
p.loadURDF("azureloong_description/urdf/AzureLoong_sr.urdf")
while 1:
time.sleep(0.1)
正确运行后应有机器人正常显示在pybullet中。
2. 确定机器人home姿态
调整机器人home姿态
在OpenLoong路径下,使用以下python3脚本测试:
import pybullet as p
import time
p.connect(p.GUI)
robot_id = p.loadURDF("azureloong_description/urdf/AzureLoong_sr.urdf")
joint_index_debug_param_dt = {}
for i in range(0, p.getNumJoints(robot_id)):
joint_info = p.getJointInfo(robot_id, i)
print(joint_info)
if joint_info[2] != p.JOINT_FIXED:
joint_index_debug_param_dt[i] = p.addUserDebugParameter(
paramName=f" {i} {joint_info[1].decode('utf-8')}",
rangeMin=joint_info[8],
rangeMax=joint_info[9],
startValue=p.getJointState(robot_id, i)[0],
)
while 1:
for joint_index, param_id in joint_index_debug_param_dt.items():
p.resetJointState(robot_id, joint_index, p.readUserDebugParameter(param_id))
time.sleep(0.1)
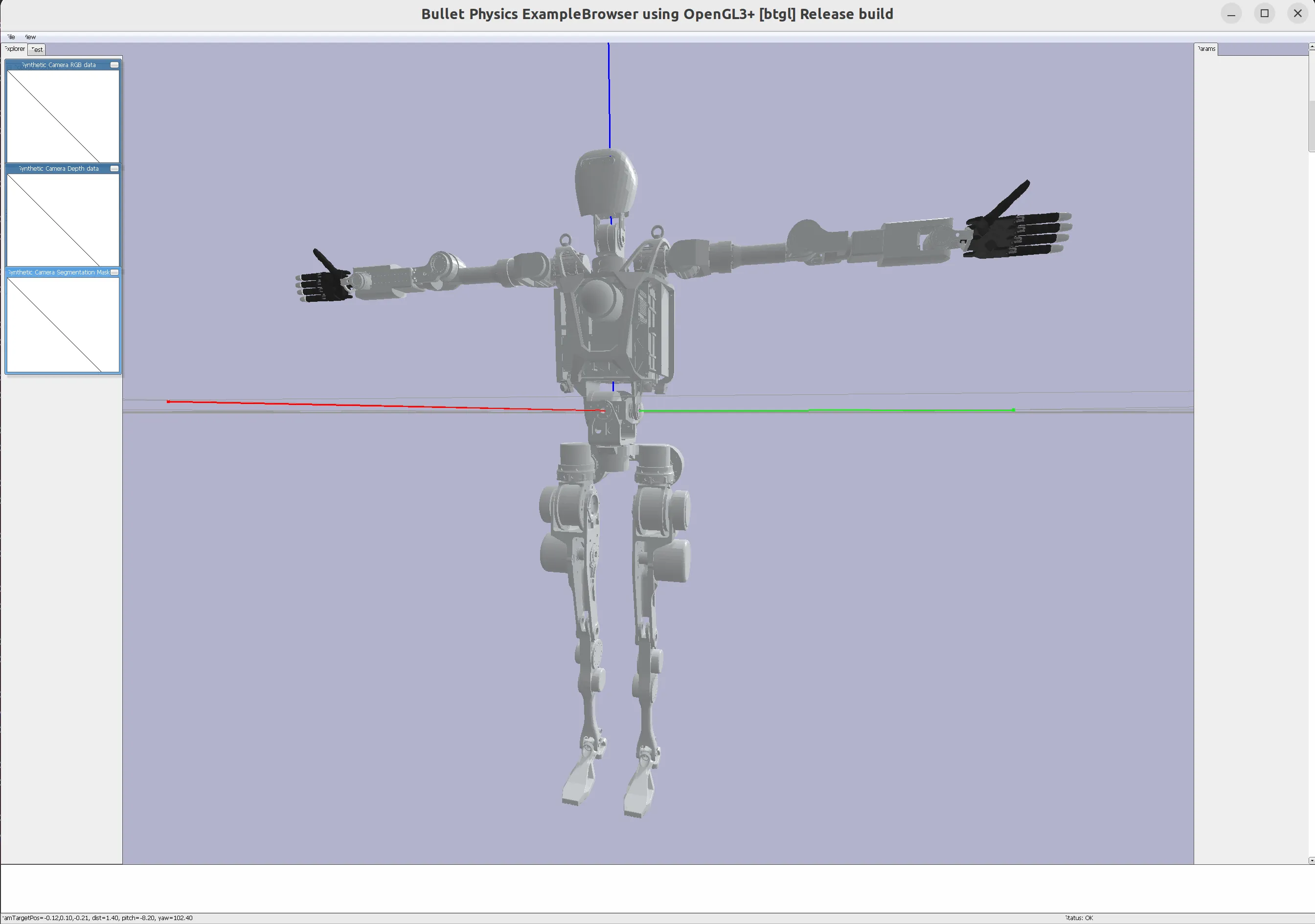
程序运行后,应当看到如下可视化界面
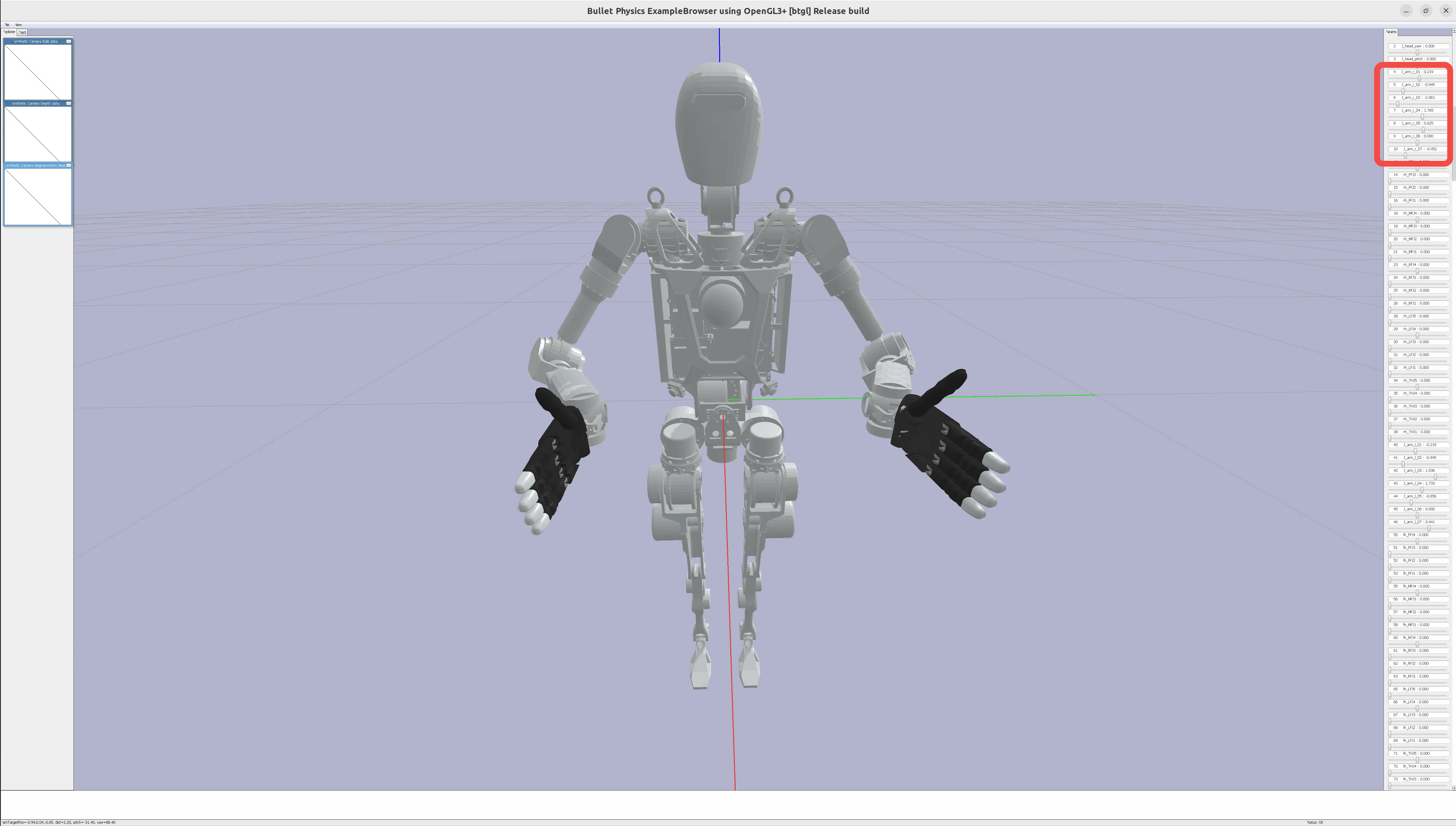
通过调节右侧的滑块,调整机器人手臂的关节角度到期望的home姿态。 例如:
将右手臂大致调整到如下位置: [0.20, -0.97, -2.00, 1.70, 0.63, 0.00, -0.43]
将左手臂大致调整到如下位置:
[-0.20, -0.97, 2.00, 1.70, -0.63, 0.00, 0.43]
3. 添加EE定义
将机械臂调整至home姿态后,需要在URDF中添加EE link 和 joint,用来做末端的位姿映射。
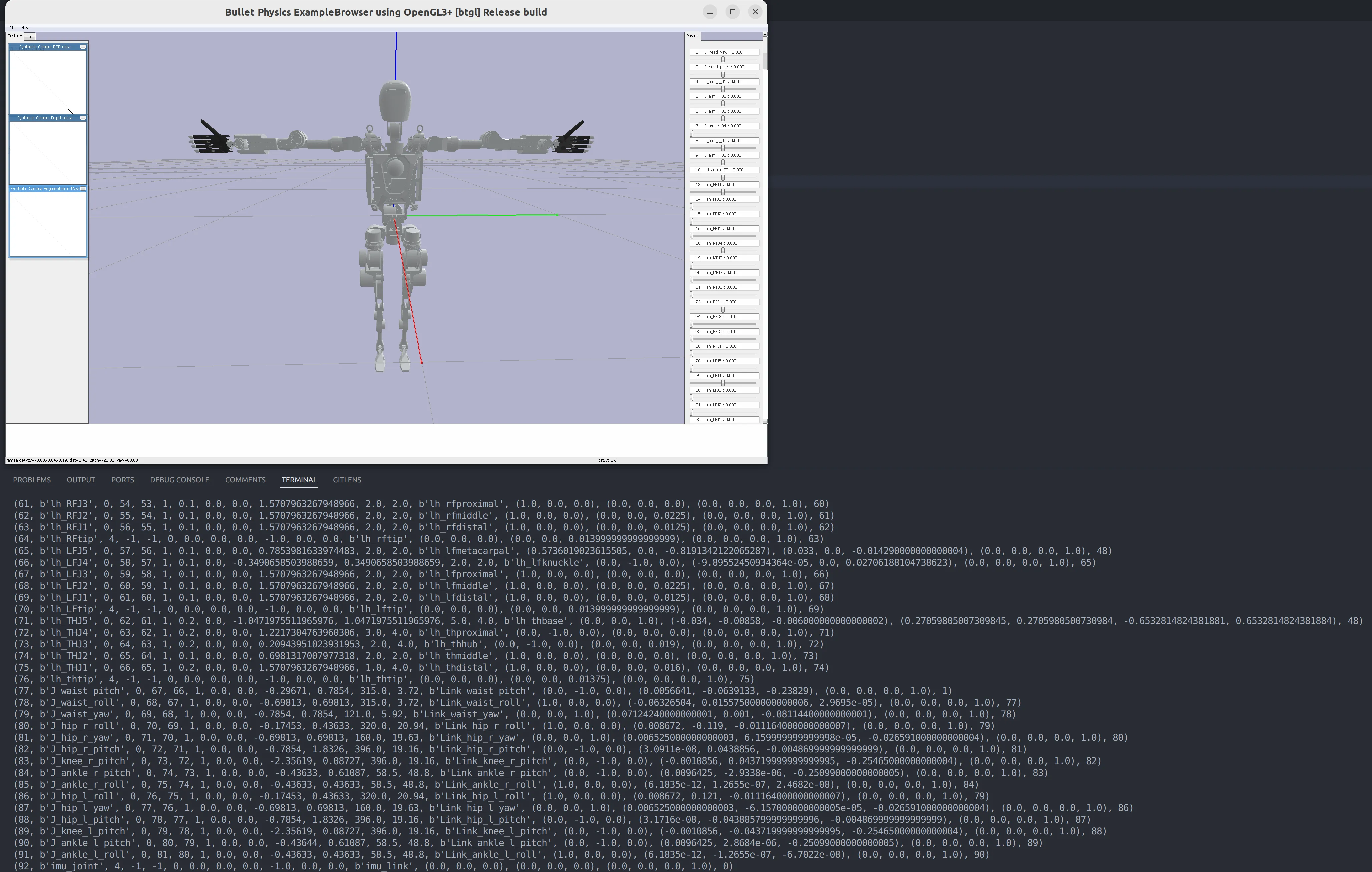
运行调整机器人home姿态的脚本时,终端会打印出机器人的joint信息,找到机器人手臂的末端link,一般是最后一个关节,或者有gripper,hand,palm这样的关键词。
例如,在OpenLoong中,我们选择:
(11, b'J_arm_r_palm', 4, -1, -1, 0, 0.0, 0.0, 0.0, -1.0, 0.0, 0.0, b'Link_arm_r_palm', (0.0, 0.0, 0.0), (0.007859, 0.00817000000000001, 0.037736), (0.0, 0.0, 0.0, 1.0), 10)
(47, b'J_arm_l_palm', 4, -1, -1, 0, 0.0, 0.0, 0.0, -1.0, 0.0, 0.0, b'Link_arm_l_palm', (0.0, 0.0, 0.0), (0.0077872, -0.30705, 0.027733), (0.0, 0.0, 0.0, 1.0), 46)
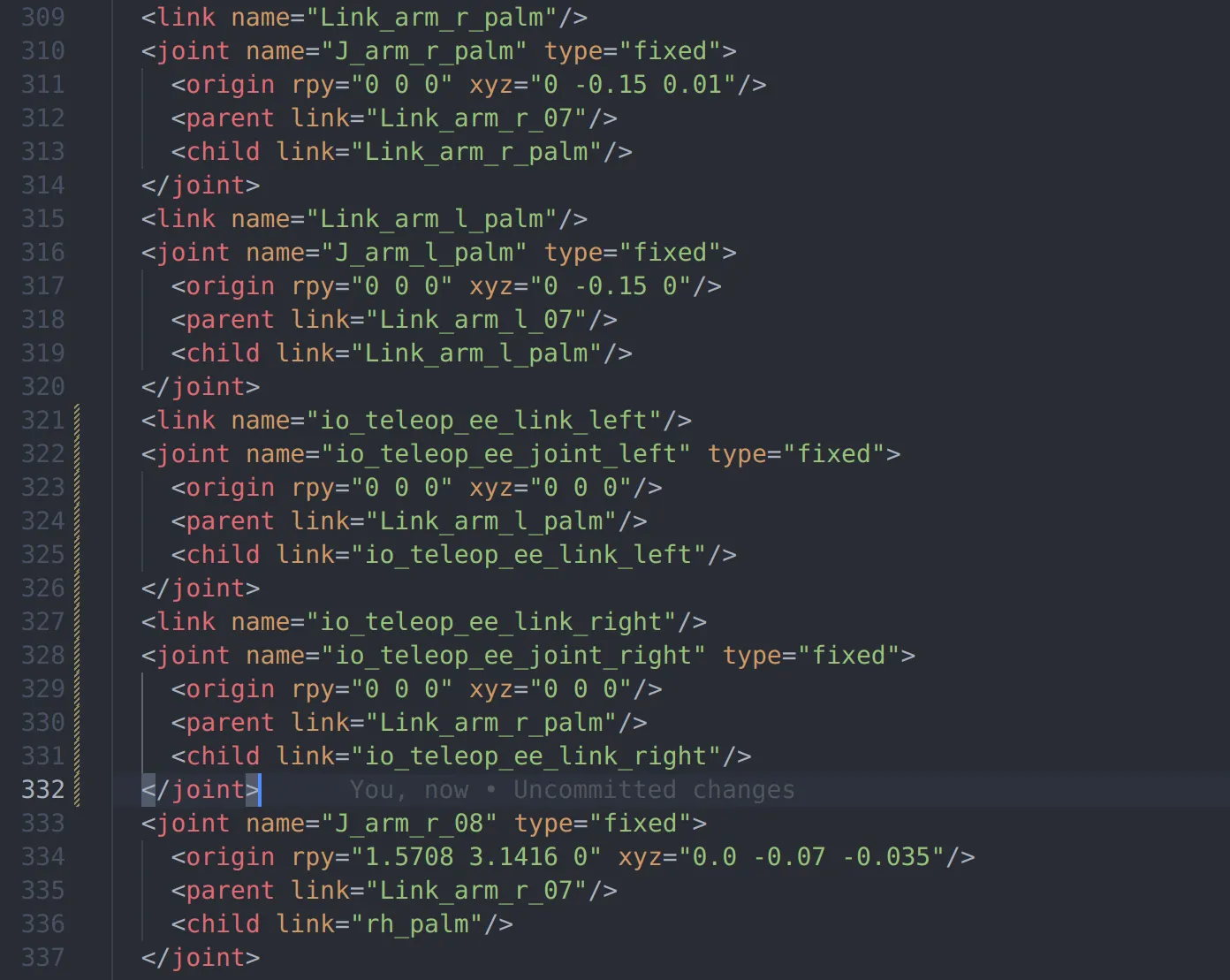
在urdf中,找到相应的link,添加EE link和joint,注意urdf树的依赖顺序:
<link name="io_teleop_ee_link_left"/>
<joint name="io_teleop_ee_joint_left" type="fixed">
<origin rpy="0 0 0" xyz="0 0 0"/>
<parent link="Link_arm_l_palm"/>
<child link="io_teleop_ee_link_left"/>
</joint>
<link name="io_teleop_ee_link_right"/>
<joint name="io_teleop_ee_joint_right" type="fixed">
<origin rpy="0 0 0" xyz="0 0 0"/>
<parent link="Link_arm_r_palm"/>
<child link="io_teleop_ee_link_right"/>
</joint>
添加完成后再次运行调整机器人home姿态的脚本,
记录下终端打印信息中,手臂关节的id(每一行打印的第一个元素),与ee link的id
对于OpenLoong,应该是:
joint_id_dt = {
"right_arm_joint_ids": [4, 5, 6, 7, 8, 9, 10],
"left_arm_joint_ids": [41, 42, 43, 44, 45, 46, 47],
}
ee_id_dt = {"right_ee_link_id": 12, "left_ee_link_id": 49}
在OpenLoong路径下,运行下方python3脚本,可视化ee坐标系
import pybullet as p
import time
import numpy as np
def debug_draw_pose(pose, replace_line_ids=None, line_width=5, line_length=0.3):
axes = np.identity(3) * line_length
colors = np.identity(3)
line_ids = [] if replace_line_ids is None else replace_line_ids
for i in range(3):
if replace_line_ids is None:
line_id = p.addUserDebugLine(
lineFromXYZ=pose[0],
lineToXYZ=p.multiplyTransforms(pose[0], pose[1], axes[i], [0, 0, 0, 1])[
0
],
lineColorRGB=colors[i],
lineWidth=line_width,
lifeTime=0,
)
line_ids.append(line_id)
else:
p.addUserDebugLine(
lineFromXYZ=pose[0],
lineToXYZ=p.multiplyTransforms(pose[0], pose[1], axes[i], [0, 0, 0, 1])[
0
],
lineColorRGB=colors[i],
lineWidth=line_width,
lifeTime=0,
replaceItemUniqueId=replace_line_ids[i],
)
return line_ids
p.connect(p.GUI)
robot_id = p.loadURDF("azureloong_description/urdf/AzureLoong_sr.urdf")
joint_id_dt = {
"right_arm_joint_ids": [4, 5, 6, 7, 8, 9, 10],
"left_arm_joint_ids": [41, 42, 43, 44, 45, 46, 47],
}
ee_id_dt = {"right_ee_link_id": 12, "left_ee_link_id": 49}
# joint home is list concat of right and left arm home pos, it must be right arm first then left arm
joint_home = [0.20, -0.97, -2.00, 1.70, 0.63, 0.00, -0.43] +
[-0.20, -0.97, 2.00, 1.70, -0.63, 0.00, 0.43]
joint_ids = [id for ids in joint_id_dt.values() for id in ids]
ee_ids = [id for id in ee_id_dt.values()]
for i in range(p.getNumJoints(robot_id)):
if i in joint_ids:
p.resetJointState(robot_id, i, joint_home[joint_ids.index(i)])
if i in ee_ids:
debug_draw_pose(p.getLinkState(robot_id, i)[4:6], line_width=10)
while 1:
time.sleep(0.1)
正确运行后,应当看到如下可视化界面
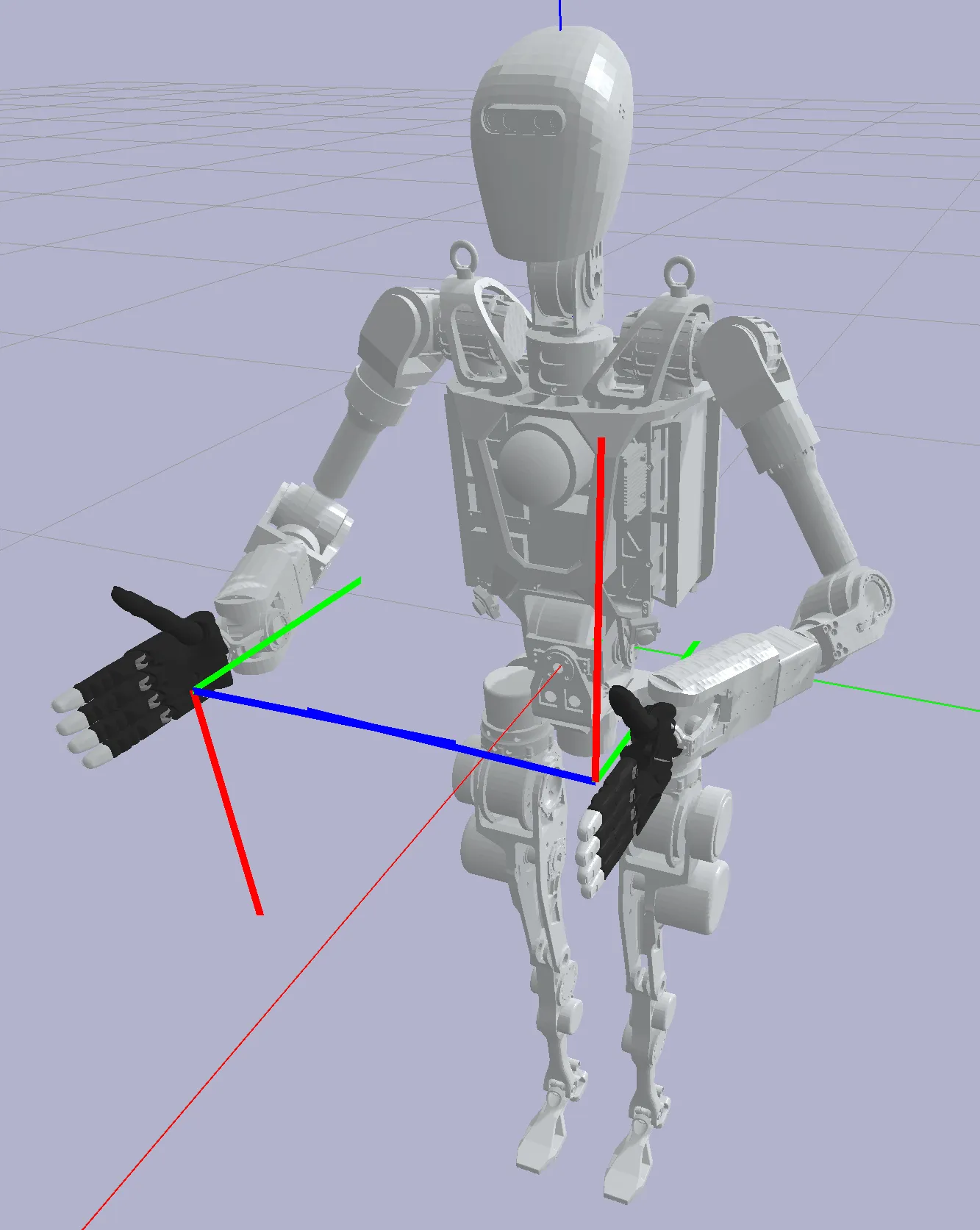
接下来通过修改urdf中io_teleop_ee_joint_right和io_teleop_ee_joint_left的origin rpy和xyz字段,
调整ee link的位置和姿态,使其满足:
- position落在掌心(或夹爪)中心(TCP)
- Z轴竖直向上
- Y轴与手面平行,且朝前(从机器人的角度,朝向机器人base的前方)
小提示:在pybullet中,为定轴旋转
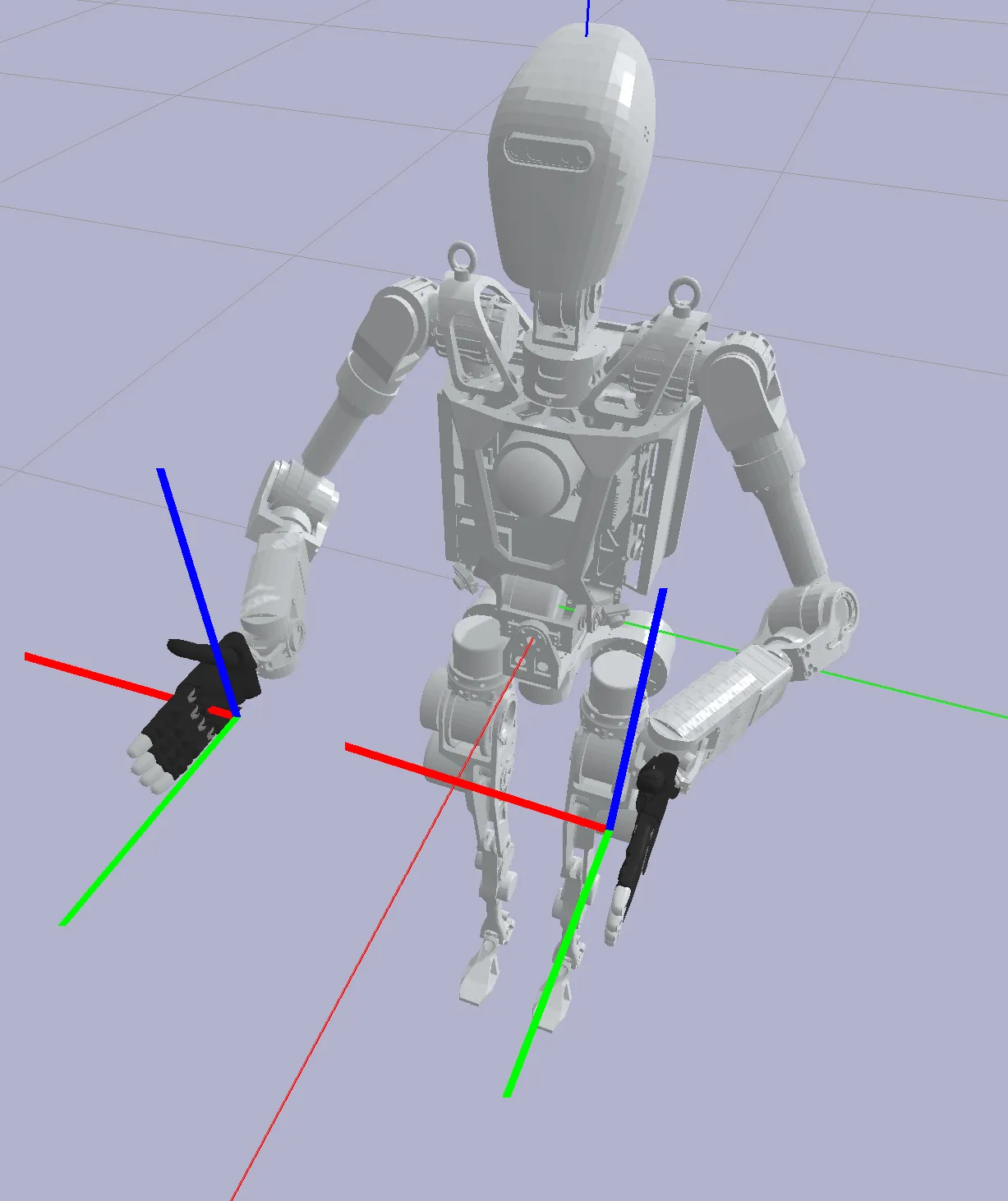
对于青龙机器人调整后的结果应该是:
<link name="io_teleop_ee_link_left"/>
<joint name="io_teleop_ee_joint_left" type="fixed">
<origin rpy="3.14 -1.57 0" xyz="0 0 0"/>
<parent link="Link_arm_l_palm"/>
<child link="io_teleop_ee_link_left"/>
</joint>
<link name="io_teleop_ee_link_right"/>
<joint name="io_teleop_ee_joint_right" type="fixed">
<origin rpy="3.14 1.57 0" xyz="0 0 0"/>
<parent link="Link_arm_r_palm"/>
<child link="io_teleop_ee_link_right"/>
</joint>
4. 填写配置文件
在OpenLoong路径下,创建vr_configs.yml文件
添加vr_configs.yml文件,填入如下内容:
(所有与joint或link index有关数值可以按照调整机器人home姿态脚本运行后的终端打印中获取)
urdf_path: azureloong_description/urdf/AzureLoong_sr.urdf # [required] 明确urdf的加载路径,对vr_configs.yml的相对路径
robot_name: OpenLoong # [required] 机器人的名字,与vr_configs.yml的上一层文件夹名字一致,命名规则为首字母大写
wo_controller: true # [required] 是否使用IO通用控制器,如果为true,则不会使用IO通用控制器
base_pose: # [required] 机器人的base位姿,需要将机器人调整到:世界系的Y周朝向机器人的前方,Z轴朝向机器人的上方,按照下方“关于base_pose的说明”确定具体数值
position: [0, 0, 0.9]
orientation: [0, 0, 0.707, 0.707]
arms: # [required] 手臂的joint index,ee_link index,以及home姿态下的关节角(rad),具体数值参考“调整机器人home姿态”章节中的内容。注意!:右手在前,左手在后
- joint_index: [4, 5, 6, 7, 8, 9, 10] # 右臂joint index
ee_index: 12 # 右手ee link index
rest_j_pos: [0.20, -0.97, -2.00, 1.70, 0.63, 0.00, -0.43] # 右臂home姿态
- joint_index: [41, 42, 43, 44, 45, 46, 47] # 左臂joint index
ee_index: 49 # 左手ee link index
rest_j_pos: [-0.20, -0.97, 2.00, 1.70, -0.63, 0.00, 0.43] # 左臂home姿态
grippers: # [optional] 对于有末端执行器的机器人,可以在此添加相应的joint index。注意!:右手在前,左手在后
- joint_index: [36, 37, 38, 15, 16, 17, 20, 21, 22, 25, 26, 27, 31, 32, 33] # 右手的全部joint index,可按照下方的数值顺序排序,如无手指(如为二指夹爪),按照index大小排序即可
thumb: [36, 37, 38] # 右手大拇指的joint index
index: [15, 16, 17] # 右手食指的joint index
middle: [20, 21, 22] # 右手中指的joint index
ring: [25, 26, 27] # 右手无名指的joint index
pinky: [31, 32, 33] # 右手小拇指的joint index
- joint_index: [74, 75, 76, 53, 54, 55, 58, 59, 60, 63, 64, 65, 69, 70, 71] # 左手的全部joint index
thumb: [74, 75, 76] # 左手大拇指的joint index
index: [53, 54, 55] # 左手食指的joint index
middle: [58, 59, 60] # 左手中指的joint index
ring: [63, 64, 65] # 左手无名指的joint index
pinky: [69, 70, 71] # 左手小拇指的joint index
waist: # [optional] 对于有腰部关节的机器人,可以在此添加相应的joint index
joint_index: [79, 80, 81] # joint index
rest_j_pos: [0, 0, 0] # home姿态下的关节角(rad),一般数值都为0
fixed_link: "Link_waist_yaw" # [optional] 对于有腰部关节的机器人,可以指定,想要固定的机器人link,一般为腰部关节的最后一个link,若不填写此字段,则默认为机器人的base link
head: # [optional] 对于有腰部关节的机器人,可以在此添加相应的joint index
joint_index: [-1, 3, 2] # 注意,头部关节的顺序应为: [roll, pitch, yaw], 缺失的关节用-1补全
rest_j_pos: [-1, 0, 0] # home姿态下的关节角(rad),一般数值都为0,同样的,缺失的关节角度也用-1补全
controller_indices: # [optional], 若“wo_controller”的值为“false”,则此处为强制项,否则可不填
cmd_ee: [10, 47] # 发送给控制器的ee link index(右手在前,左手在后),一般可能与“arms”中制定的io_teleop_ee_link的index不同,可能为机器人的最后一个输出轴,具体以真实机器人的控制接口为准。
base: [1, 1] # 发送给控制器的base link index(右手在前,左手在后),声明目标ee pose是相对于哪一个坐标系的,具体以真实机器人的控制接口为准。若为urdf tree中的第一个link,则填写-1
dorsal: # [optional] 对于有单一的躯干升降自由度的机器人,一般与“waist”关键字不会同时存��在,这里仅为示例全所有的config
joint_index: 10 # joint index
dorsal_move_scale: 0.1 # [optional] 对于有单一的躯干升降自由度的机器人,这里用来控制升降速度
base_move_scale: [0.1, 0.1] # [optional] 对于有base可动的机器人,这里用来控制平移速度和旋转速度
vibration_thresholds: # [optional] 可以通过以下内容来控制VR手柄的震动
ee_dist: [0.15, 0.2] # 若左右手的ee link距离在此范围内,则手柄震动
tabletop_height: 0.85 # 设置桌面高度,若ee link的Z坐标接近此值,则手柄震动
collision: true # 若设置为true,则夹爪与物体碰撞时,手柄震动
non_fixed_joint_ids: [4, 5, 6, 7, 8, 9, 10, 36, 37, 38, 15, 16, 17, 20, 21, 22, 25, 26, 27, 31, 32, 33,
41, 42, 43, 44, 45, 46, 47, 74, 75, 76, 53, 54, 55, 58, 59, 60, 63, 64, 65, 69, 70, 71, 2, 3] # [required] 在VR app中我们可以可视化机器人的运动,在这里可以指定所有希望在VR APP中运动的机器人关节的index,一般为上面"arms", "grippers", "waist"("dorsal"), "head"中的joint index拼接, 不需要在意顺序
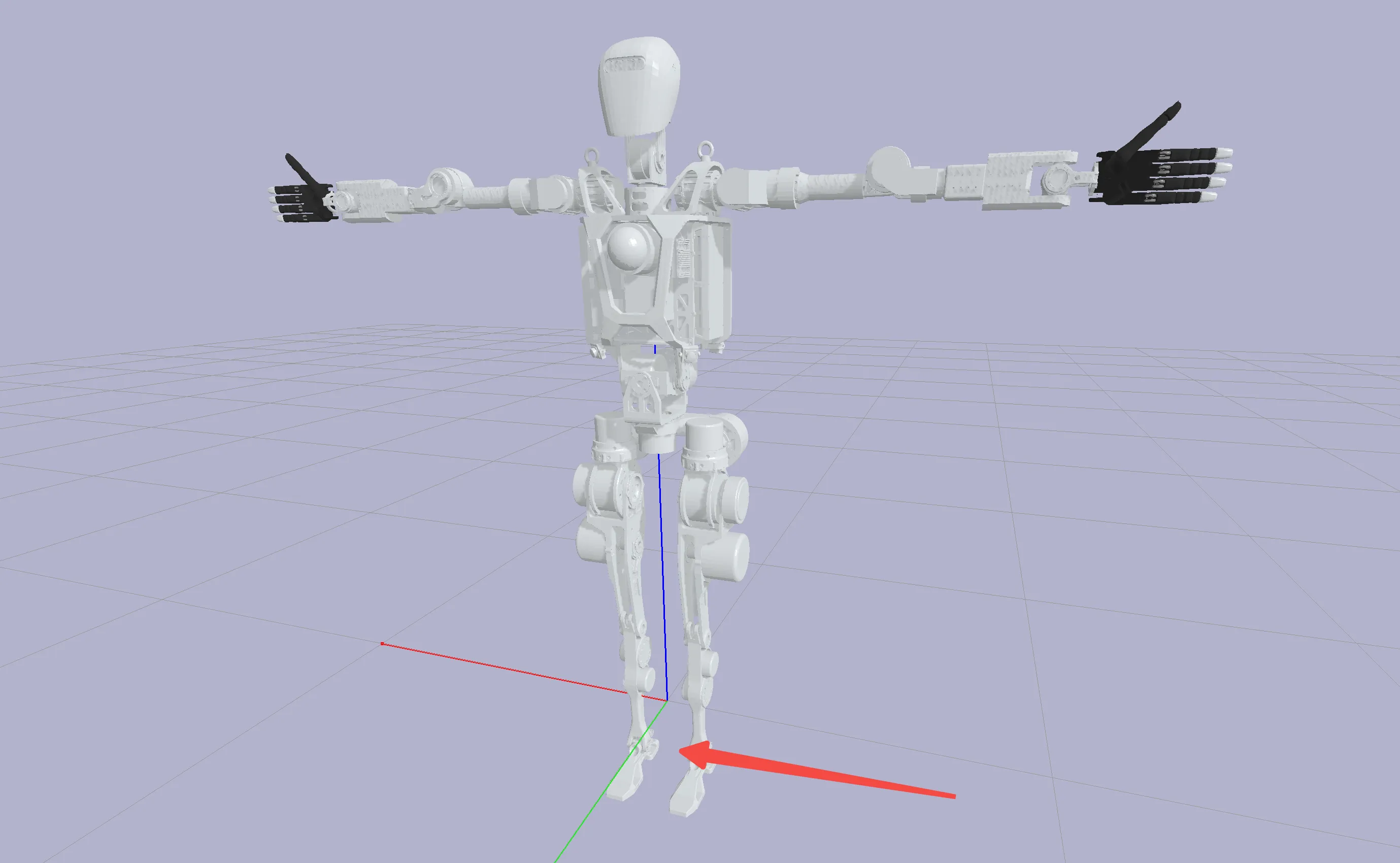
关于base_pose的说明
base_pose是机器人的base位姿,
需要将机器人的姿态调整到:世界系的Y轴朝向机器人的前方,Z轴朝向机器人的上方;
位置上不做强制修改,但可以通过调整机器人的高度将其底部调整到地面上。
在OpenLoong路径下,使用以下python3脚本测试:
import pybullet as p
import time
p.connect(p.GUI)
p.loadURDF(
"azureloong_description/urdf/AzureLoong_sr.urdf",
basePosition=[0, 0, 0.9],
baseOrientation=[0, 0, 0.707, 0.707],
)
while 1:
time.sleep(0.1)
5. 验证配置文件
接下来,拉取IO提供的,应当在机器人工控机上运行的示范代码仓,此仓库依赖ros1环境
git clone https://github.com/ioai-tech/TeleXperience_robot_ros1_ws
cd TeleXperience_robot_ros1_ws
catkin build
source devel/setup.bash
在此仓库下,原本有示范的包含配置文件的OpenLoong文件夹,可以先将其拷贝到其他路径下或删除,用上方生成的文件替换。
在连接好TeleXperience所有设备后,首先在一个终端启动roscore
export ROS_IP=192.168.123.24
export ROS_MASTER_URI=http://192.168.123.24:11311
roscore
然后运行以下命令,启动仿真机器人的无控制器控制节点
cd TeleXperience_robot_ros1_ws
export ROS_IP=192.168.123.24
export ROS_MASTER_URI=http://192.168.123.24:11311
python3 src/io_teleop_robot_control_node/scripts/uni_constraint_control_node.py --robot_name OpenLoong
开启遥操作后,机器人应当能够跟随头显以及手柄的运动而运动。