添加机器人配置文件到橙派
准备配置文件压缩包
以OpenLoong为例:
在OpenLoong路径下完成三个配置文件vr_configs.yml,controller_v2.yml,mocap_to_robot_command_v2.yml后,在该路径下新建urdf文件夹和meshes文件夹,将urdf文件放进urdf文件夹,STL等可视化文件放进meshes文件夹,并打包OpenLoong文件夹。
上传配置文件压缩包
启动树莓派和橙派后,工控机wifi连接到Y2_5G_0023,打开浏览器,在网址栏输入10.42.0.3:7876,进入配置页面。
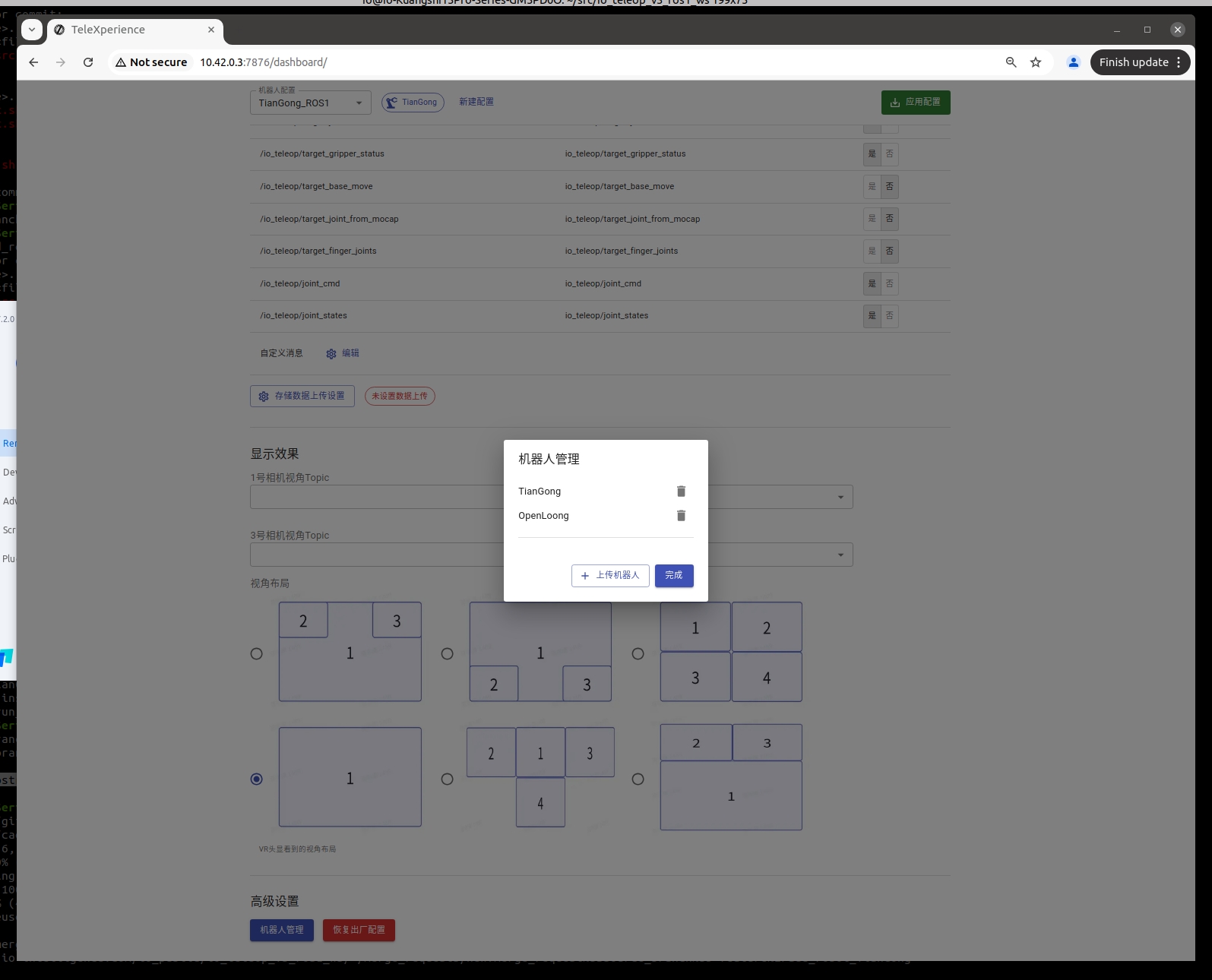
在网页下面找到机器人管理,进入后选择上传新机器��人,并选择对应机器人的压缩包上传即可。
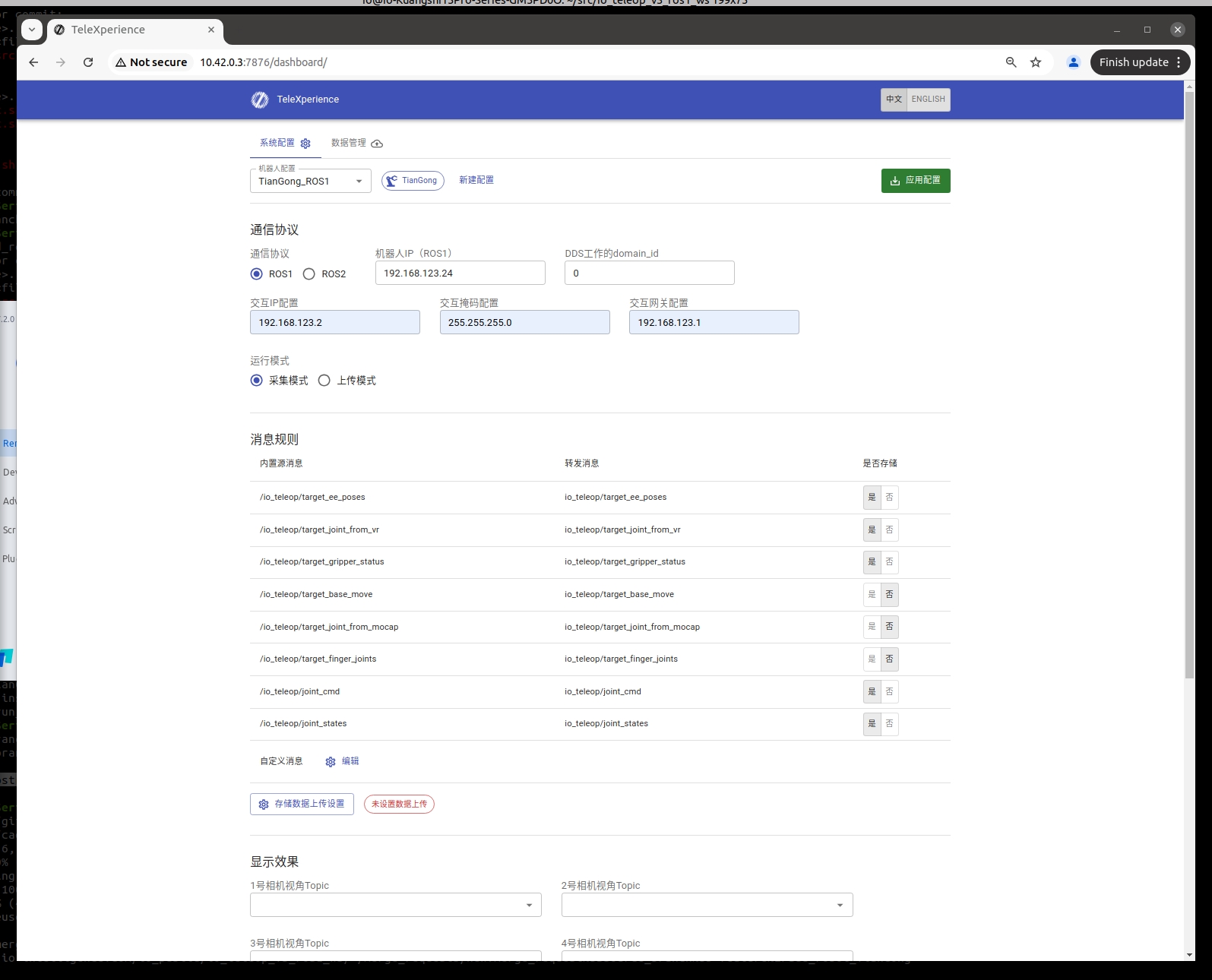
配置机器人ip
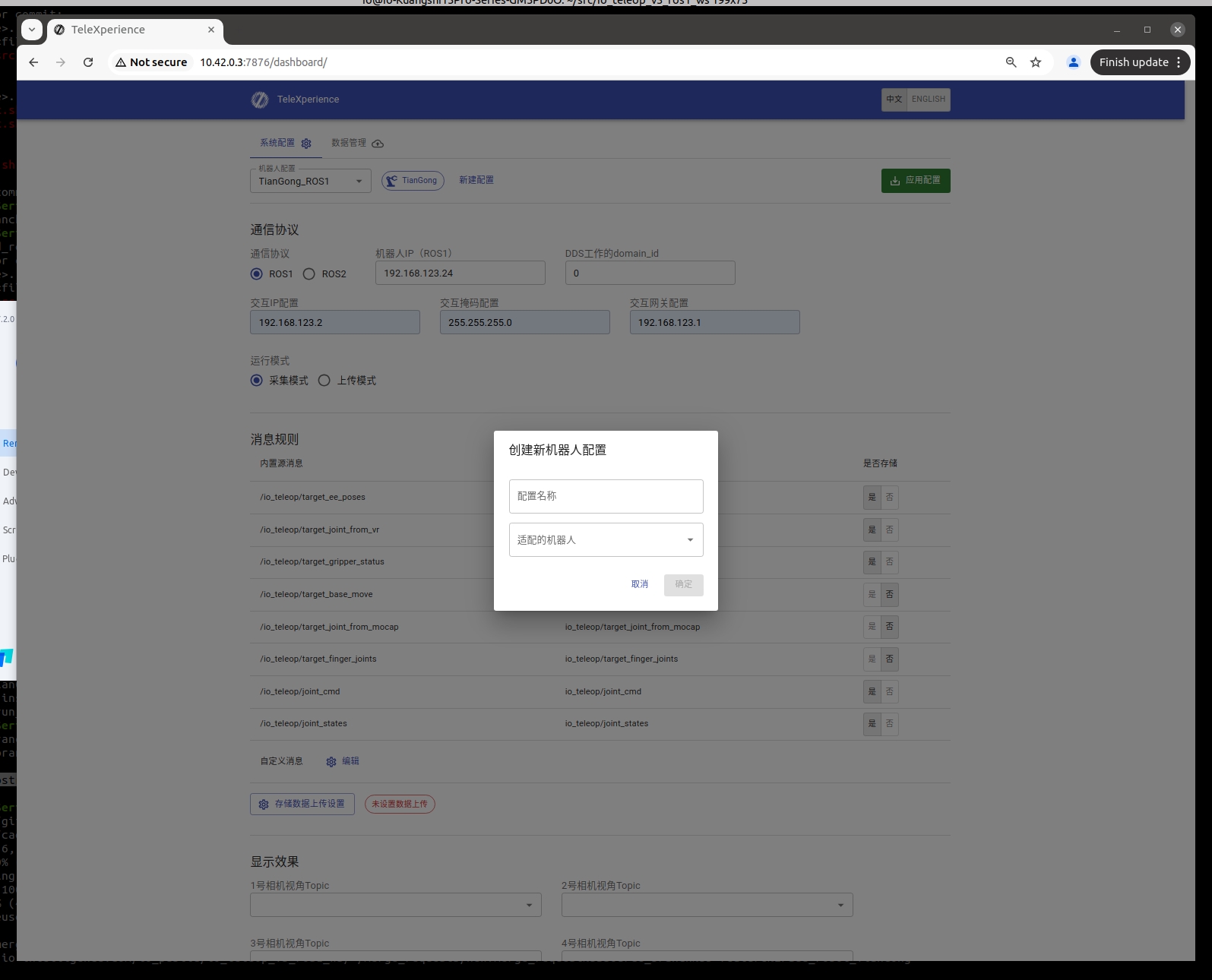
在网页上边点击新建配置,在上传配置文件压缩包后,应在适配的机器人选项中找到已经上传的机器人,选中,并自定义配置名称(一般为'机器人名称'+'_ROS1'),然后点击确定。
在通信协议下面选择ROS1,运行模式选择采集模式,并设置机器人的IP,domain_id,网关等。
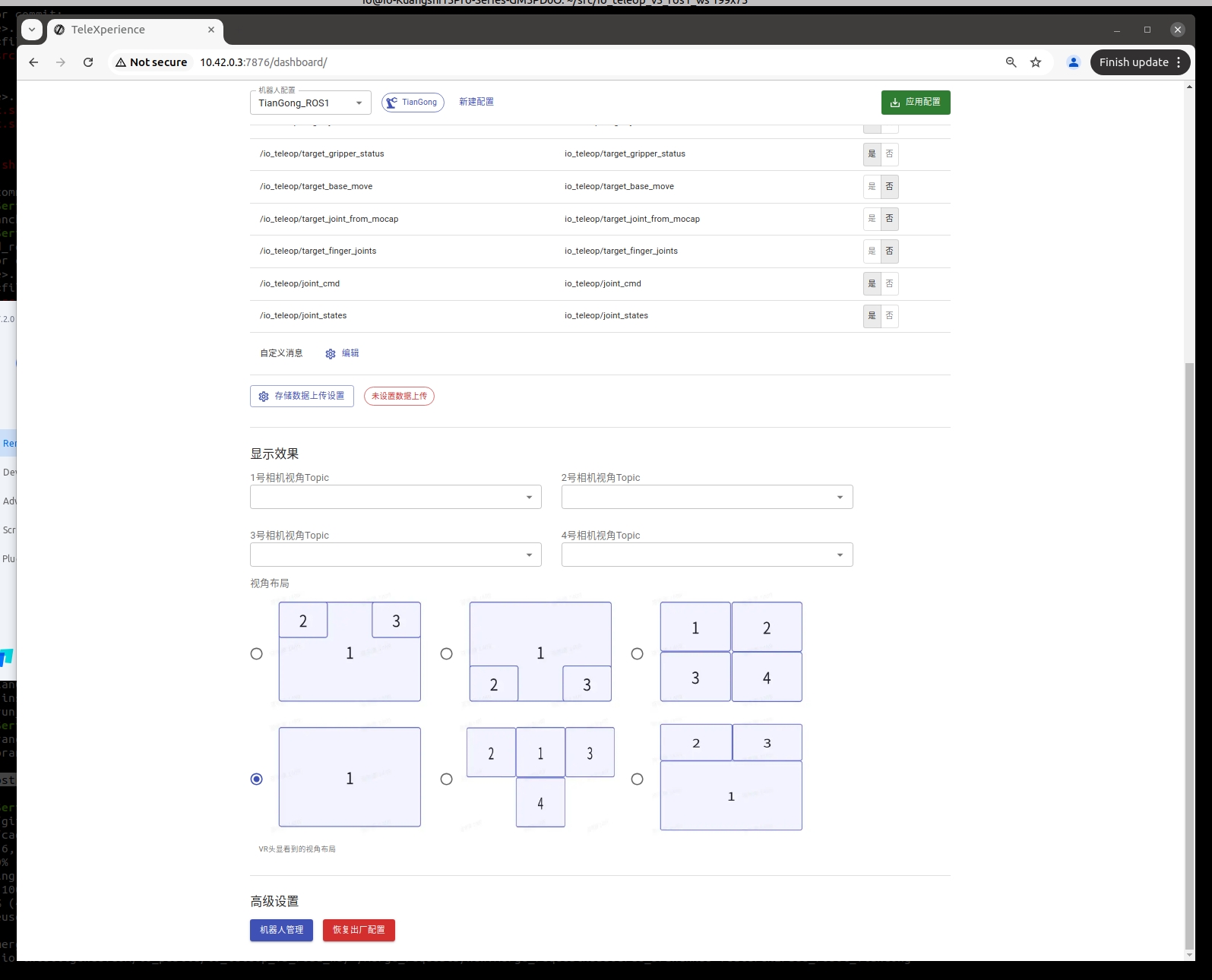
在显示效果中根据自身需求选择视角布局。
实现vr仿真控制
全部完成后即将机器人的配置文件添加到了橙��派,在完成ros节点的编写后,即可在工控机上实现vr对仿真机器人的控制。
首先启动两个终端,分别更改工控机ip与配置机器人IP中的内容对应
export ROS_IP=192.168.123.24
export ROS_MASTER_URI=http://192.168.123.24:11311
export ROS_DOMAIN_ID=0
在一个终端下启动roscore,另一个终端下启动ros节点,在vr眼镜中点击start teleop,即可实现vr对仿真机器人的控制。