Pro版本
准备工作
1. 开始同步
右脚脚心外翻随即恢复 
2. 停止同步
右脚脚心内翻随即恢复 
3. 继续同步
右脚脚心再次外翻随即恢复 
⚠️ 注意事项
- 使用腿部进行操作时,需要保持手柄在VR视野范围内。
- 使用腿部进行操作时,腿部完成动作并恢复后指令才会生效。
控制机器人运动
1. 机器人移动
前后左右运动
- 左脚抬起脚尖并保持,机器人前进。
- 左脚抬起脚跟并保持,机器人后退。

- 左脚向左旋并保持,机器人左转。
- 左脚向右旋并保持,机器人右转。

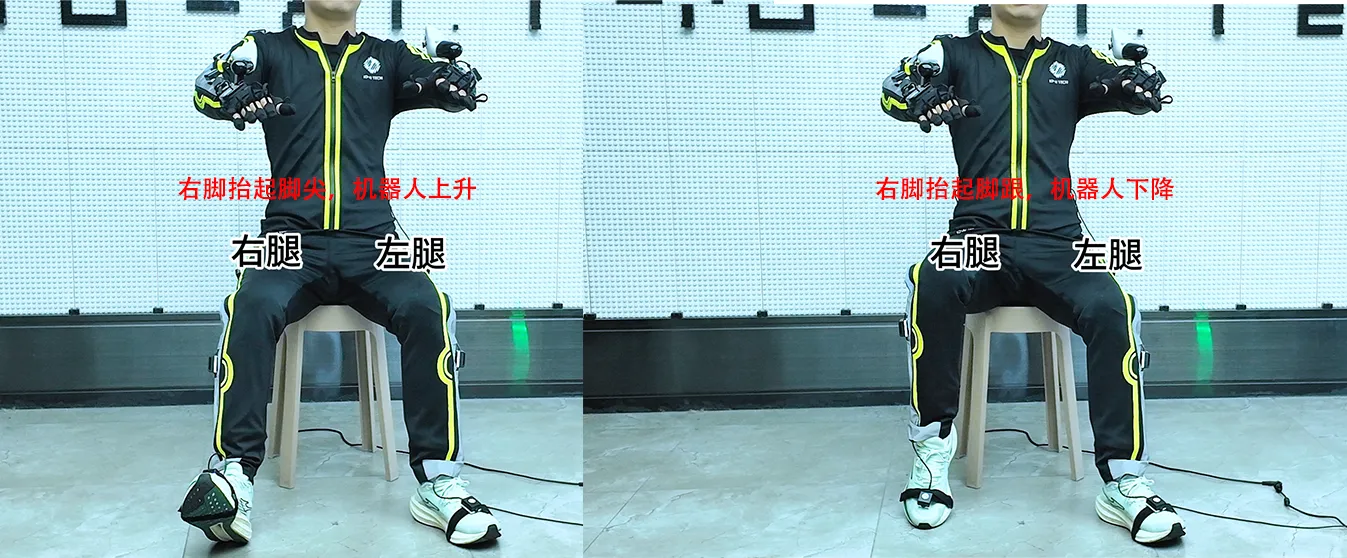
上升与下降
- 右脚抬起脚尖并保持,机器人上升。
- 右脚抬起脚跟并保持,机器人下降。
2. 机器人手部姿态控制
末端姿态保持不变,手臂位置仍可跟随人体同步移动
双脚脚心外翻并保持
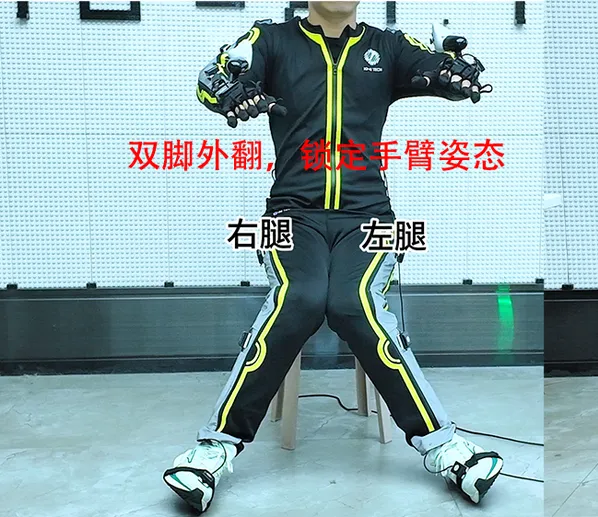
手臂位置保持不变,末端姿态仍可跟随人体同步运动
双脚脚心内翻并保持

恢复对应部位与人体的同步运动
在同步过程中,人体正常坐着、脚平放在地面时,机器人末端姿态和手臂位置都正常跟随手部运动。

3. 机器人回到初始姿态
首先右脚内翻随即恢复,先停止同步。
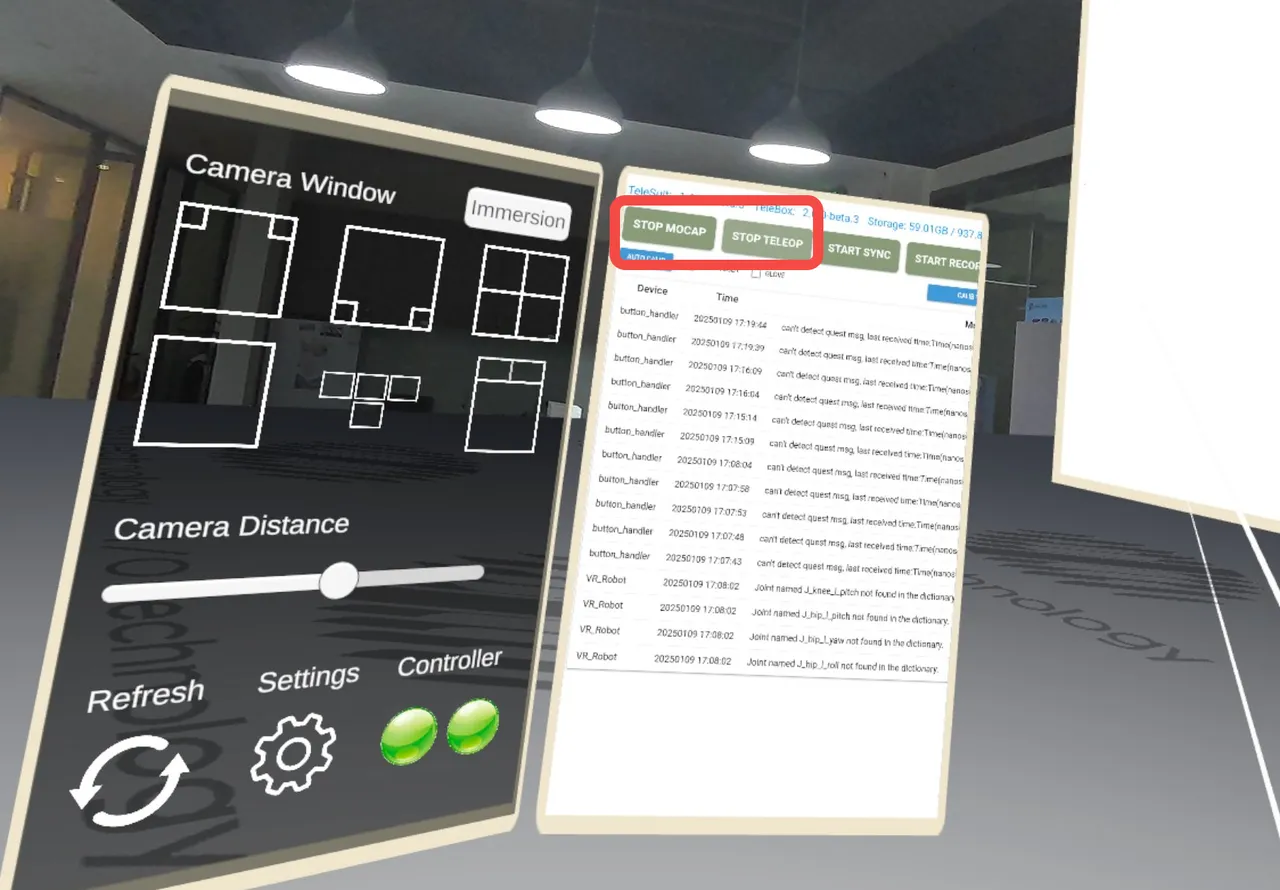
用手柄在VR头显内的功能按钮面板点击STOP TELEOP停止遥操作。
双脚同时外旋随即恢复,即可使机器人回到初始姿态。

⚠️ 注意事项
- 使用腿部进行操作时,需要保持手柄在VR视野范围内。
- 机器人运动时,由于同步了人体头部运动,固定在机器人头部的第一人称视角图像会产生相应变化。
- 如果图像卡顿不流畅,可能是由于笔记本电脑对实时图像渲染支持的不足,在教程阶段可忽略该问题。
开始数据采集
1. 开始数据采集
进入遥操作状态并开启同步后,左脚内翻随即恢复即可开始数据采集。

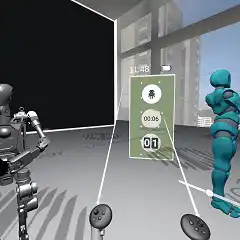
对应右侧看板变化:
- 计时器开始计时,以秒为单位增加
- 计数器增加1
2. 保存数据
左脚外翻随即恢复

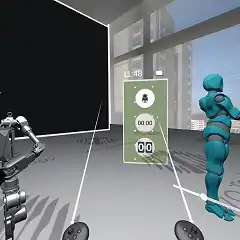
对应右侧看板变化:
- 计时器清零
- 计数器数字不变
3. 删除数据
左脚外翻保持两秒钟后再恢复

对应右侧看板变化:
- 计时器清零
- 计数器数字减少1
从手套控制切换到手柄控制
1. 停止遥操作与同步
- 右脚内翻随即恢复,停止同步。
- 点击STOP TELEOP、STOP MOCAP停止遥操作
2. 拆卸手套
- 将两只手套的航空插头分别从袖口的航空插座上拔出。

- 脱下手套,取出手柄,即可使用手柄继续进行遥操作。

⚠️ 注意事项
必须先停止同步并退出遥操作状态,才可以进行手套拆卸。否则会造成机器人手臂失控,导致安全问题。