机器人与具身智能
Bringing robots
everywhere, for everyone
艾欧智能聚焦真实世界机器人与具身智能数据解决方案。基于自研软硬件一体化平台,我们提供可扩展、高质量、可定制的训练数据能力,支持 Physical AI 的高效研发与落地应用。
我们的客户
应用案例
更多应用案例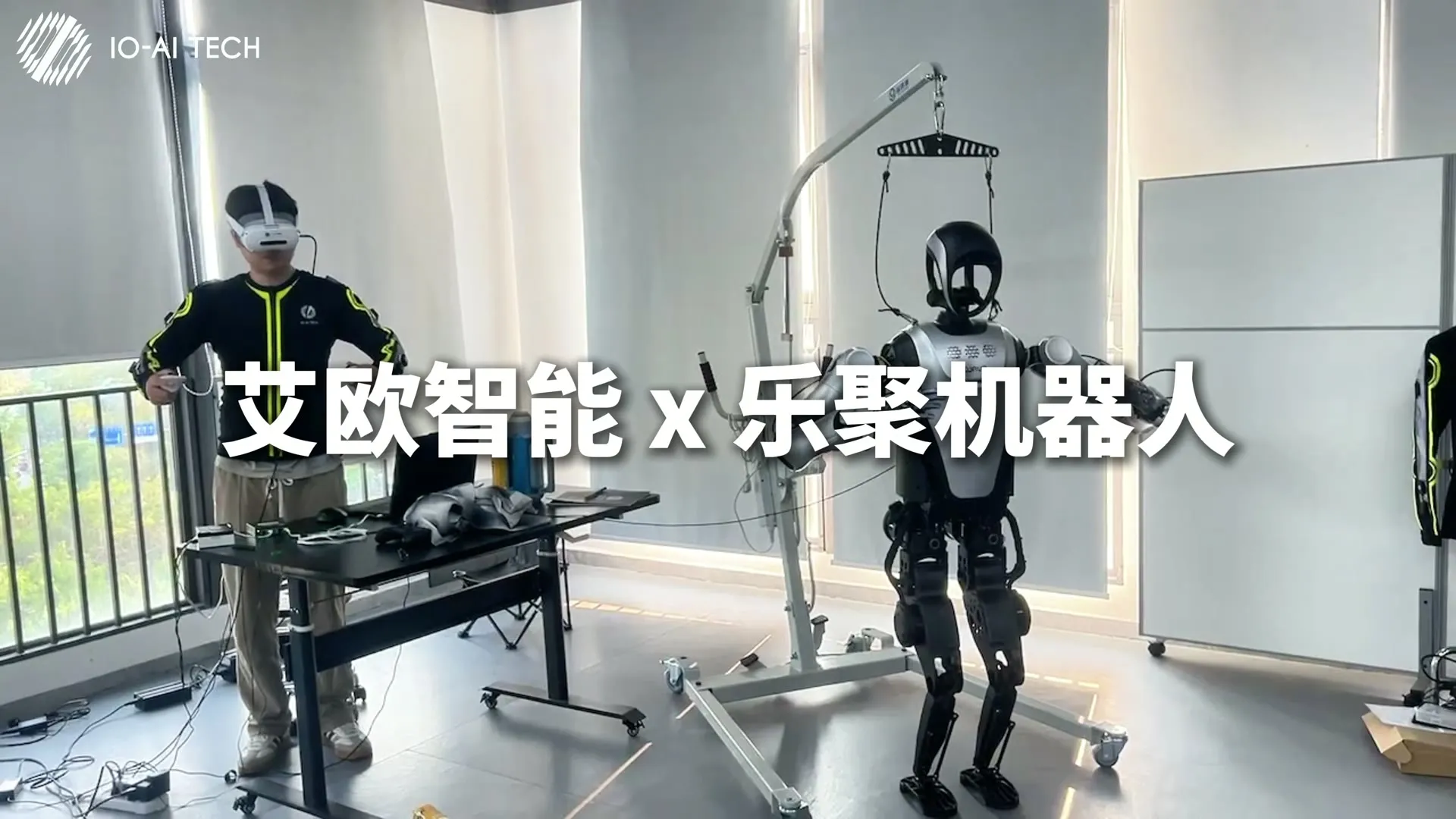
乐聚机器人

智元机器人 灵犀X2

逐际动力 TRON 2

灵巧手适配案例合集
资源
最新动态
更多动态发布
艾欧智能开源 ROSView:具身智能数据的离线可视化工具
支持mcap/bag/db3/hdf5/bvh等机器人领域多种格式的可视化,纯浏览器端解析无需上传,提供开放的、可二次开发的机器人研发基础设施。
新闻
艾欧智能签约加入“蜂巢数据共创行动”,以数据全链路能力共筑物理AI新生态
2026年4月16日,在以“蜂行天下,数驱智能”为主题的觅蜂(Maniformer)一站式物理AI数据服务平台发布会上,艾欧智能正式签约加入“蜂巢数据共创行动 ”,成为这一全球物理AI数据生态的核心共建者之一。
新闻
腾讯云与艾欧智能达成战略合作,联合打造端云一体化具身智能解决方案
2月9日,腾讯云与具身智能机器人基础场景数据提供商和解决方案提供商艾欧智能达成战略合作,双方将深度整合各自优势资源,共同打造面向具身智能机器人领域的端云协同解决方案,基于腾讯云底座和艾欧智能平台的模式,降低具身智能企业的研发门槛,推动中国机器人产业向高端化、智能化加速迈进。
关于
艾欧智能成立于 2023 年,愿景是让机器人走进千行百业、服务每一个人。我们致力于打造领先的机器人与具身智能数据基础设施,并与客户紧密合作,共同推动前沿模型的发展,加速其在真实世界中的落地应用。
我们的创始团队来自腾讯、小鹏汽车、字节跳动、亚马逊、百度、大疆、智元、ABB等公司,在机器人与人工智能领域拥有深厚的行业经验与技术积累。
联系我们
办公地址
- 总部深圳市光明区凤凰街道侨凯路459号招商局智慧园C1栋5楼
- 办事处北京、上海、杭州、大阪 (JP)、新加坡 (SG)、悉尼 (AU)、旧金山 (US)

