硬件连接
观看视频快速熟悉穿戴步骤
选择产品配置查看穿戴视频
航空插头连接


TeleSuit主控连接
电源连接
使用出厂自带充电器进行连接通电。

主控指示灯和Mocap指示灯
启动成功后,树莓派的信号指示灯会出现慢闪烁,Mocap灯保持绿色常亮。

注意:开启动捕功能后,Mocap 指示灯会切换为蓝绿闪烁状态;关闭动捕功能后,指示灯将恢复为绿色常亮。
路由器指示灯
- 红色常亮:说明路由器已启动并正常运行。
- 白色常亮:表示开启了无线中继功能,且已成功接入外部互联网。


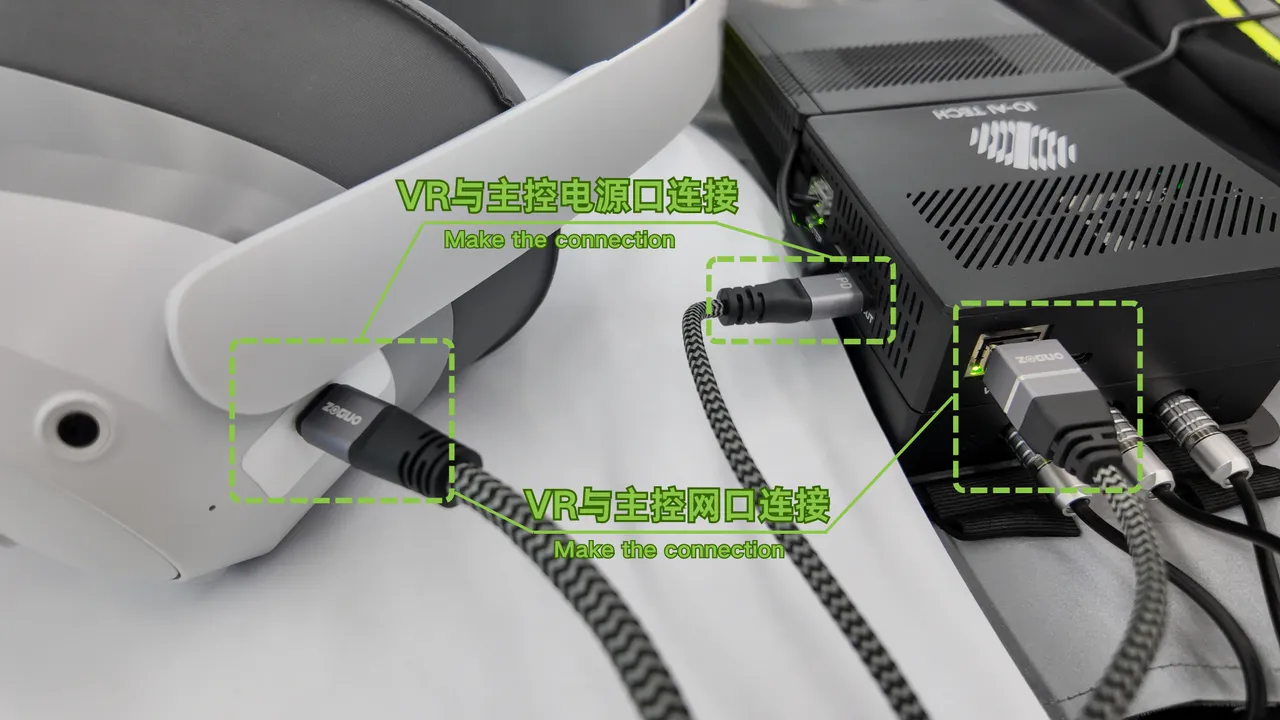
TeleSuit主控与VR连接
有线连接
请使用出厂自带的一转二连接线,网口接入树莓派网口,Type-C口接入树莓派的供电口。
无线连接
参考Wi-Fi连接章节,连接TeleSuit Wi-Fi即可。
Mocap动捕服连接
Mocap动捕上半身连接
出厂时,Mocap 动捕的上半身通常已默认连接。每次使用前,建议检查上半身的航空插头是否稳固,以确保设备正�常运行。

Mocap动捕下半身连接
下半身在腰部位置配有两根航空插头。连接时需注意左右顺序,确保插头连接正确,避免影响设备使用

Mocap动捕手套连接
分别连接左手和右手手套,注意区分左右,确保连接顺序正确。

Mocap动捕有线外骨骼连接

Mocap动捕无线外骨骼连接
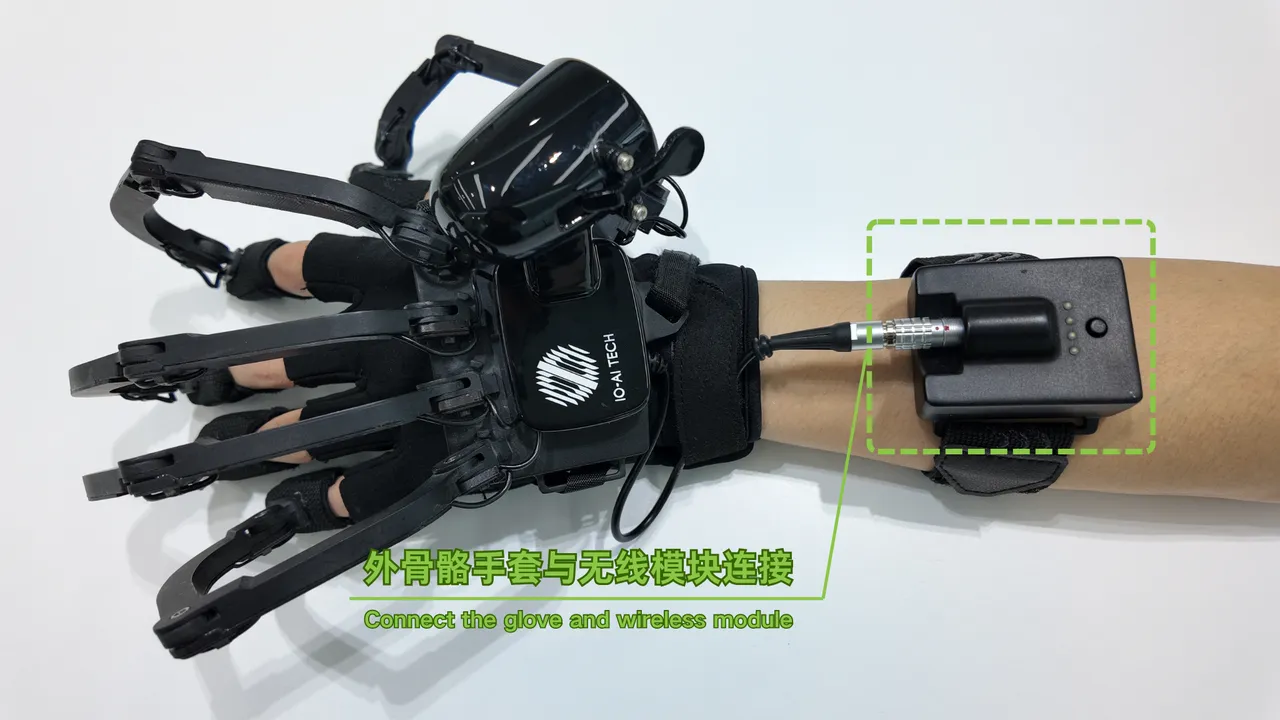
无线模块使用说明
设备按钮
| 功能 | 操作方法 |
|---|---|
| 开机 | 短按一下松开,再长按3秒(电量灯闪一下),再松开 |
| 关机 | 短按一下松开,再长按3秒(电量灯闪一下),再松开 |
| 关机状态下查询电量 | 短按一下松开 |
| 进入配对模式 | 步骤1:开机状态下,短按一下松开,再长按3秒(电量灯闪一下)继续长按至10秒(蓝灯亮)松开按键关机 步骤2:重新开机(短按一下松开,再长按3秒(电量灯闪一下),再松开),蓝灯亮 |
设备指示灯
| 状态 | 指示灯 |
|---|---|
| 无WiFi连接 | 红灯常亮 |
| 监听模式/配对模式 | 蓝灯常亮 |
| WiFi已连接、无设备数据传输 | 绿灯常亮 |
| WiFi已连接、有设备数据传输 | 绿灯闪烁 |
| 发现设备 | 蓝绿灯闪烁 |
首次配对步骤
-
连接电源,开启TeleSuit 3.0设备。
-
开启无线设备:“短按+长按”设备按钮开机。
-
将设备切换到配对模式:
- 开机状态下,短按一下按钮松开,再长按3秒(电量灯闪一下)继续长按至10秒(蓝灯亮)松开按键关机。
- 重新开机(短按一下按钮松开,再长按3秒(电量灯闪一下),再松开),蓝灯亮。
- 进行WiFi配置:
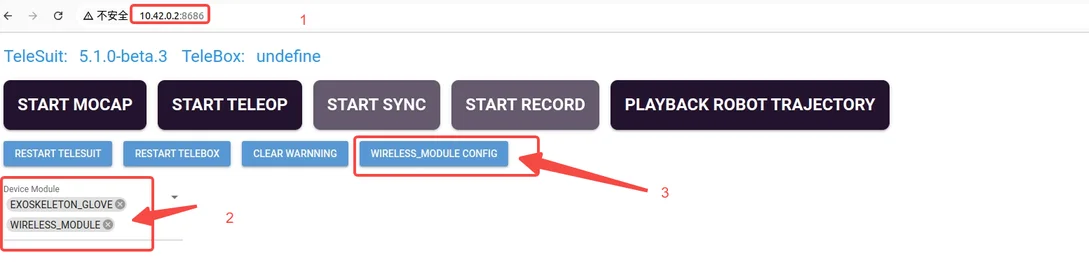
- 连接TeleSuit WiFi(注意:需要将PC连接至WiFi的2.4G网段,例如:IO_2.4G_*****),并进入10.42.0.2:8686界面。
- 在Device Module设备选项框中选择“WIRLESS_MODULE”和“EXOSKELETON_GLOVE",此时界面会出现WIRELESS_MODULE CONFIG按钮。
- 点击WIRELESS_MODULE CONFIG按钮并进入无线模块配置界面。
- 进行ESP配网:
- 在“手套控制台”点击ESP配网。
- 输入TeleSuit设备的WiFi名。
- 输入密码(已默认填写)。
- 点击开始配网。

- 进行设备绑定:
- 查看设备信号灯状态,信号灯应由蓝色变为绿色闪烁。
- 在无线配置界面设备绑定界面选择对应设备。
- 可通过检查设备名称分辨设备。
- 也可通过点击LED闪烁来分辨对应设备。
- 根据无线模块连接的设备,点击绑定左手或绑定右手。
- 绑定成功后查看左右手设备确认设备是否绑定成功(注意:设备已绑定过左右手时,会自动跳转到左右手)。

完成配对后开始使用
- 依次穿戴好无线模块和外骨骼手套,连接并开启设备,确认绿灯闪烁。
- 此时可以点击START MOCAP启动设备。
TeleBox连接方式
电源连接
将电源插入 Type-C 插口为 TeleBox 通电。

系统指示灯
上电后,指示灯依次变化为:红色亮起表示通电正常;蓝色亮起表示系统初始化中(约 5 秒);红蓝交替闪烁表示初始化完成,设备已就绪。
采集模式(出厂模式)
连接方式
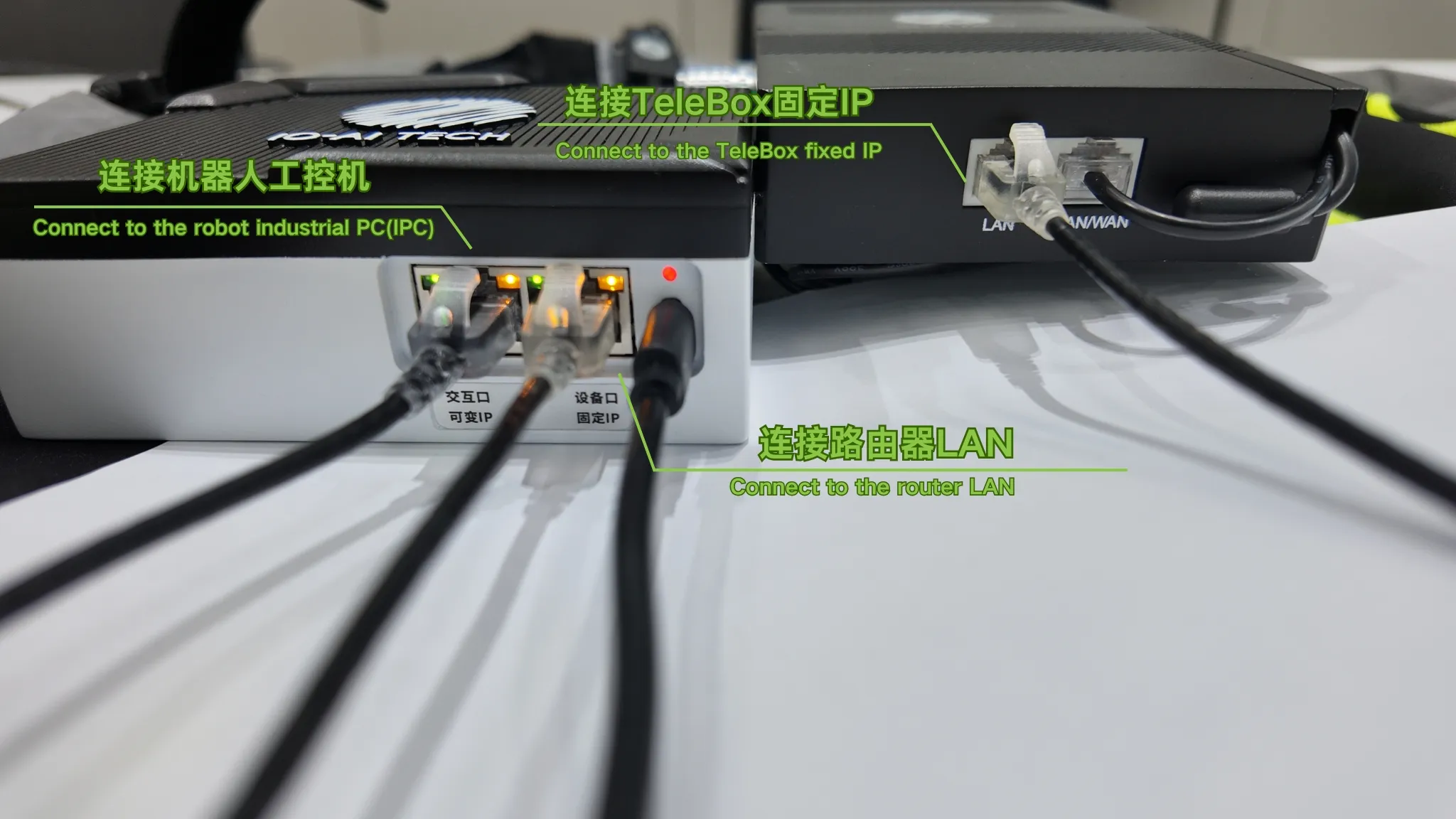
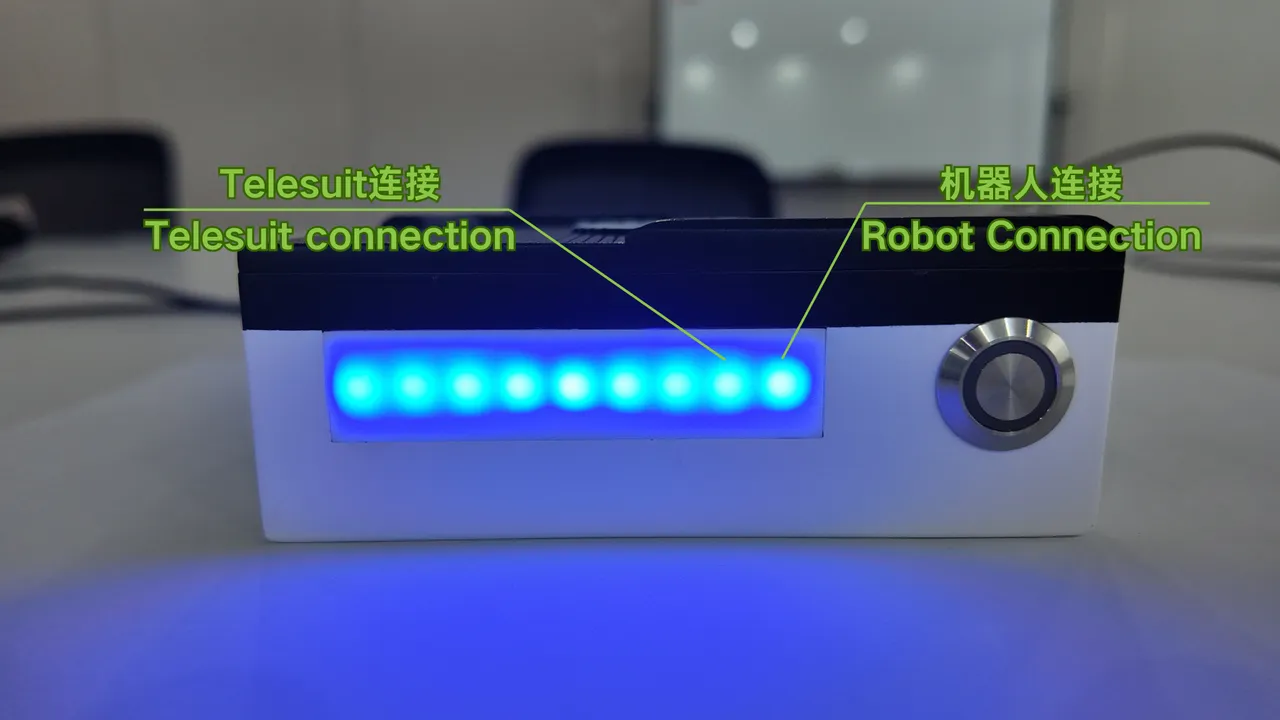
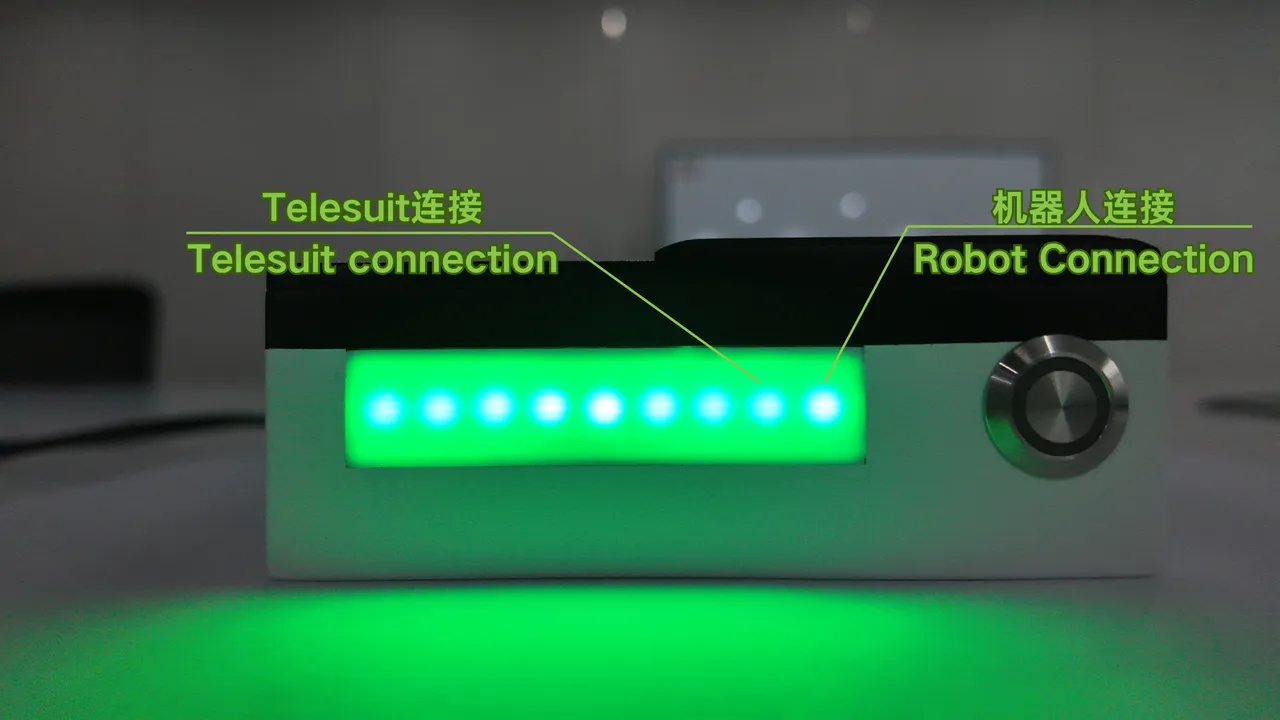
状态面板指示灯
当所有连接正常时,指示灯呈全绿状态;若检测到 TeleSuit 无法连接,右起第二个指示灯会变红;若检测到机器人无法连接,右起第一个指示灯会变红。
上传模式
连接方式
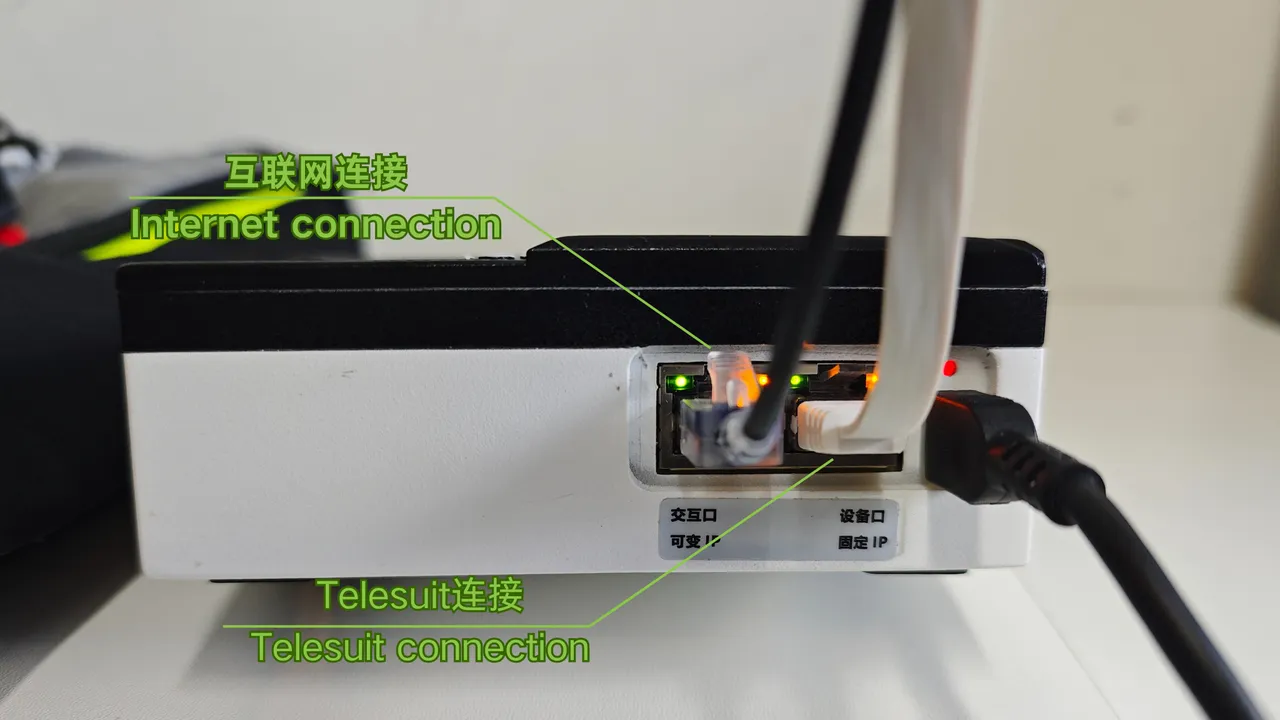
状态面板指示灯
当所有连接正常时,指示灯呈全蓝状态;若检测到 互联网 无法连接,右起第一个指示灯会变红。

远程模式
连接方式
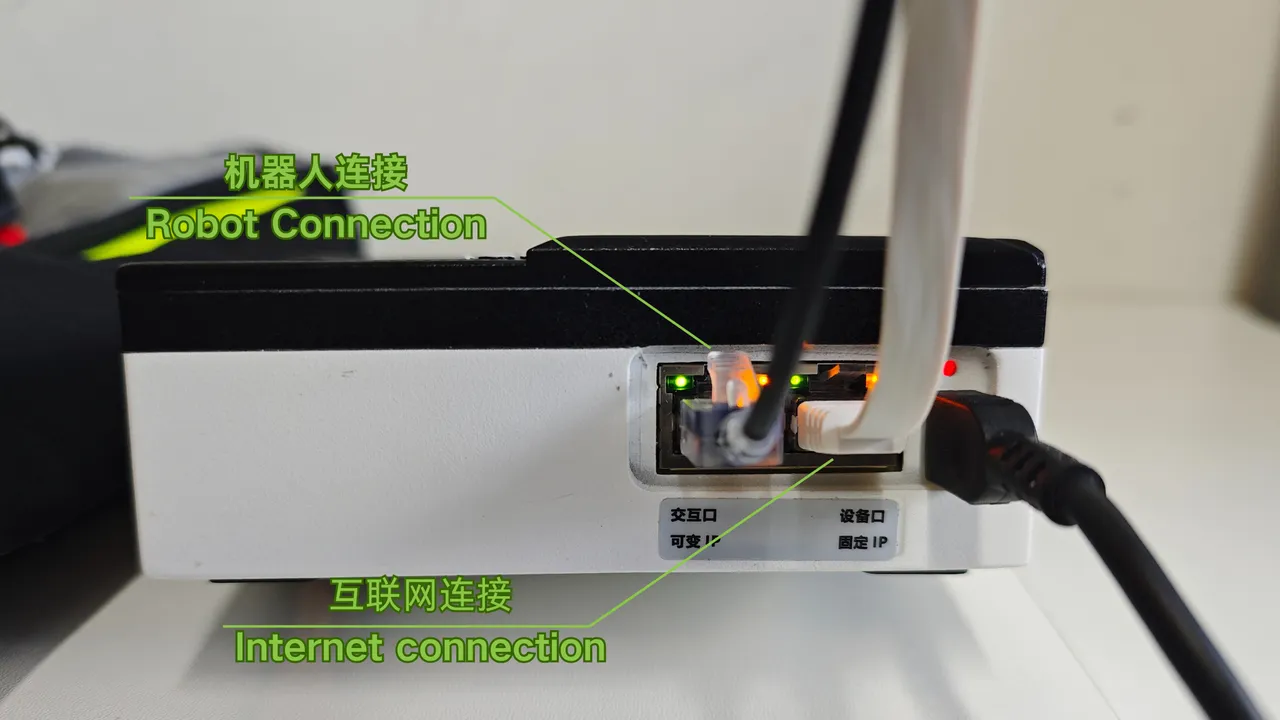
状态面板指示灯
当所有连接正常时,指示灯呈全蓝状态;若检测到 TeleSuit 无法连接,右起第二个指示灯会变红;若检测到机器人无法连接,右起第一个指示灯会变红。