TeleBox 使用
系统配置
通信设置

- DDS工作的domain_id: 设置设备所属的 DDS 通信域编号,用于区分不同系统间的通信范围。
- 机器人IP(ROS1模式下):指定机器人工控机在 ROS1 模式下的 IP 地址。
- 交互IP配置:配置 TeleBox 与机器人工控即通信的交互 IP 地址。
- 交互掩码配置:设置交互网络的子网掩码,确保通信设备位于同一网段。
- 交互网关配置:用于指定交互网络的默认网关,以实现跨网段访问能力。
末端执行器配置
- 若设备套餐中包含动捕手套,且末端执行器为灵巧手,请根据实际配置选择对应的灵巧手型号,以实现相应控制功能。
- 若末端执行器为非灵巧手(如二指夹爪等),暂不支持该功能,请在选项中选择None。
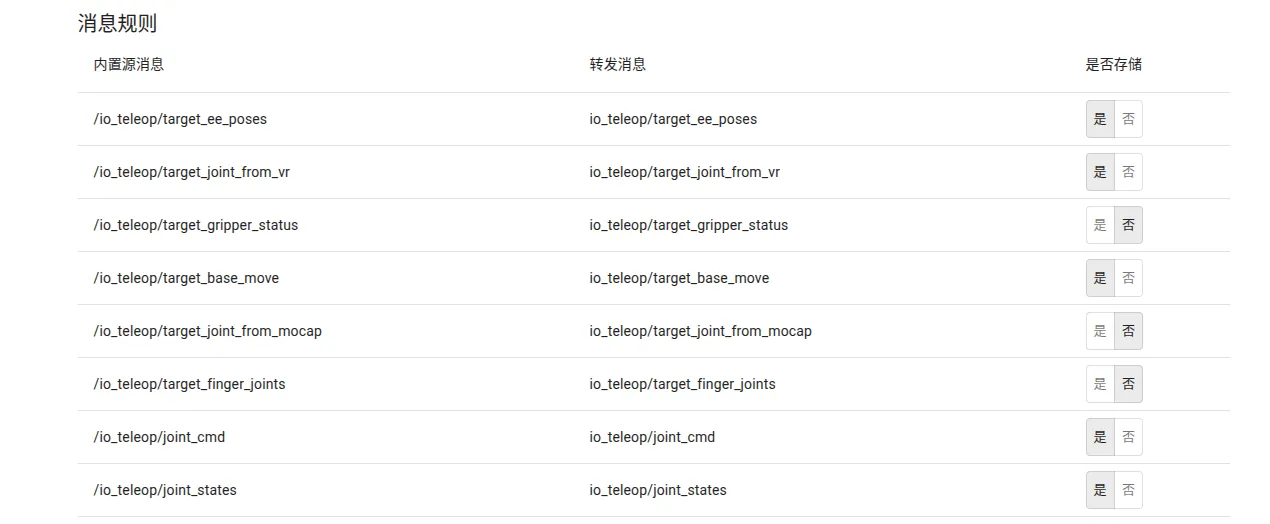
消息管理
设置消息录制时是否存储
添加相机消息
在自定义消息栏,点击编辑

选择需要添加的消息类型,填写原始消息名称和映射消息名称
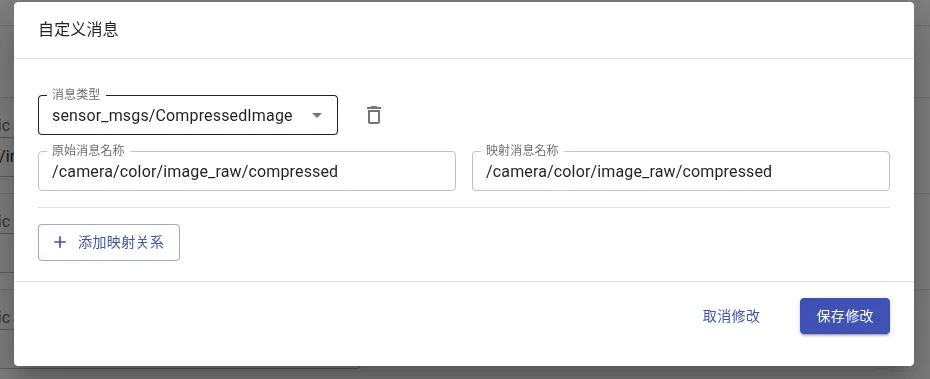
点击保存修改完成添加,
添加成功后,可在显示效果界面中选择

相机视角布局
功能废弃
此功能已废弃,不再支持。

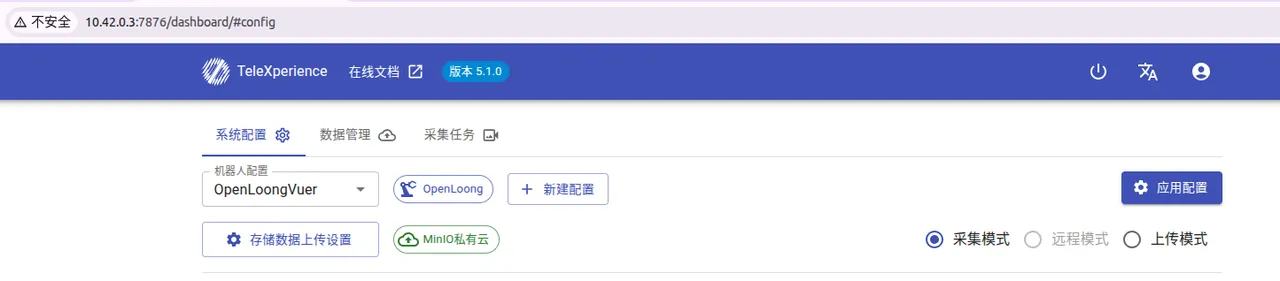
模式切换
通过网页切换
选择所需模式,点击应用配置即可。
通过实体按钮切换
长按盒子上的实体按钮,可在上传模式与采集模式之间切换。切换前,请先按照相关章节完成网络连接设置。


数据管理
查看数据列表
点击数据管理选项卡,查看所采集的数�据。
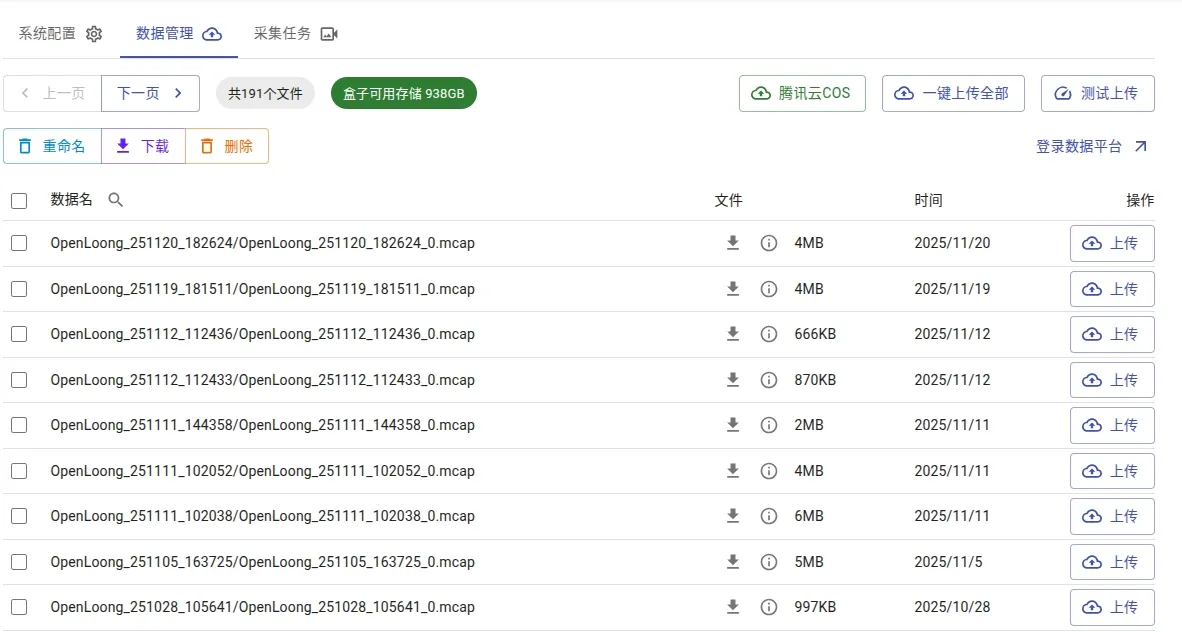
将BOX中数据上传到平台
参考TeleBox单独连接互联网进行网络设置。
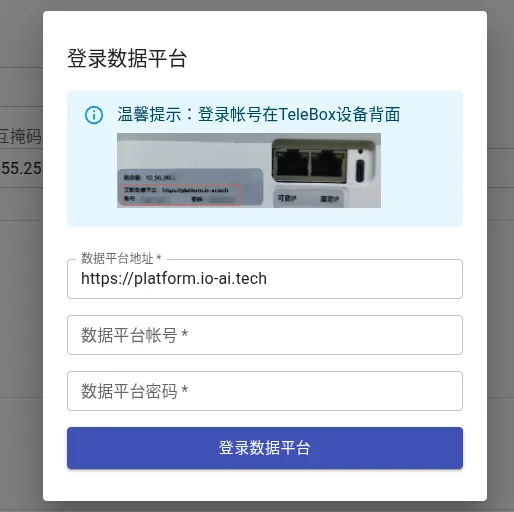
登陆平台
点击页面右上角的登陆,输入box设备上提供的帐号密码,登陆到数据平台。
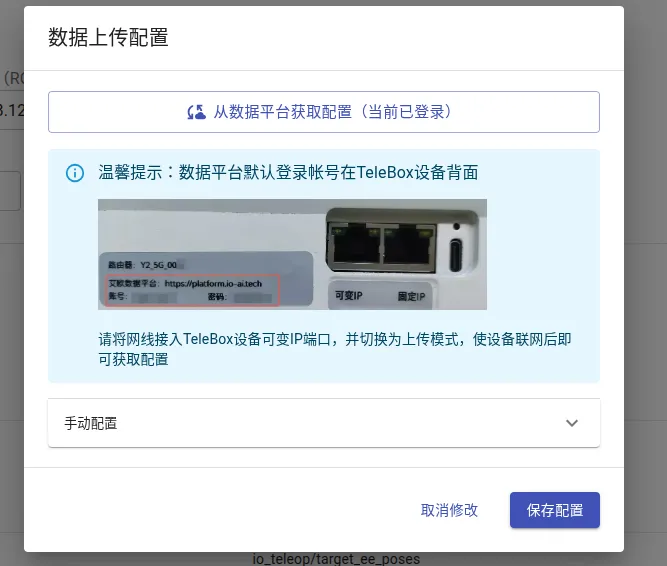
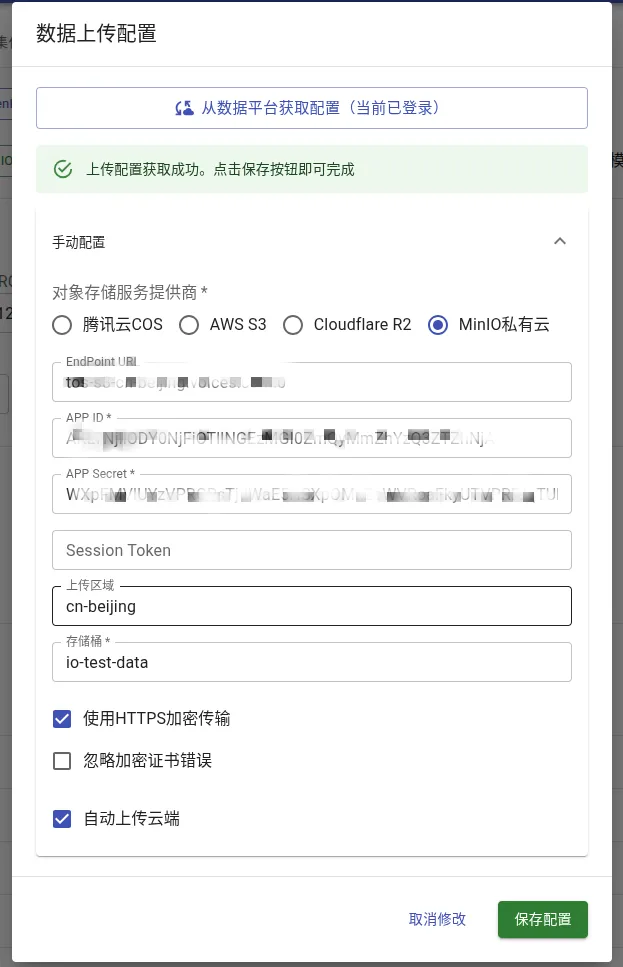
点击从数据平台获取配置,然后点击保存配置即可完成设置。
手动上传
勾选需要上传的数据后,点击上传,或者直接点击一键上传全部即可上传到数据平台
自动上传
在获取平台配置时,勾选自动上传云端,下次切换至上传模式时,数据将自动上传
下载BOX数据到本地
选中需要下载的文件,点击下载即可将数据文件保存到本地
采集任务管理
提示
该功能为定制服务,相关操作需由专业团队协助完成。建议您联系销售代表获取远程功能账号,并由技术支持团队提供具体指导。
