模型训练
训练机器人学习模型通常需要处理数据、配置环境、编写训练脚本、监控训练过程等多个步骤。对于非技术人员来说,这个过程既复杂又容易出错。
平台提供了产品化的训练流程,无需编写代码,通过网页界面就能完成从数据准备到模型部署的完整操作。你只需要选择数据、选择模型、配置参数,然后点击开始训练。
快速上手:3 步开始训练
第 1 步:准备训练数据
训练数据可以来自多个来源。对平台内已入库的 ROS 录制数据(如 MCAP,后续亦支持 bag、db3 等),建议在导出或发起训练前完成 质量检测 中的规则配置与结果确认(预处理完成后自动执行,支持全局与项目范围),以降低劣质数据进入训练的概率。
平台导出数据(推荐):
- 在数据导出页面,选择已标注的数据集
- 选择 LeRobot 或 HDF5 格式导�出
- 导出完成后,在训练页面选择"平台导出数据"
- 从导出历史中选择对应的导出记录
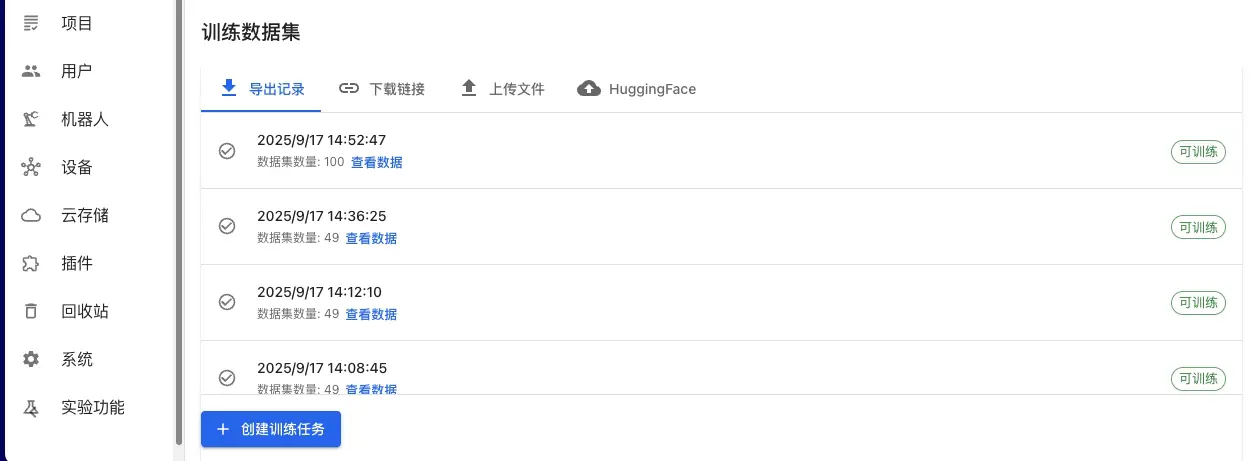
其他数据来源:
- 外部数据集:通过 URL 链接导入公开数据集
- 本地数据上传:支持 HDF5、LeRobot 等标准格式
- HuggingFace 数据集:直接从 HuggingFace Hub 获取公开数据
第 2 步:选择模型和计算资源
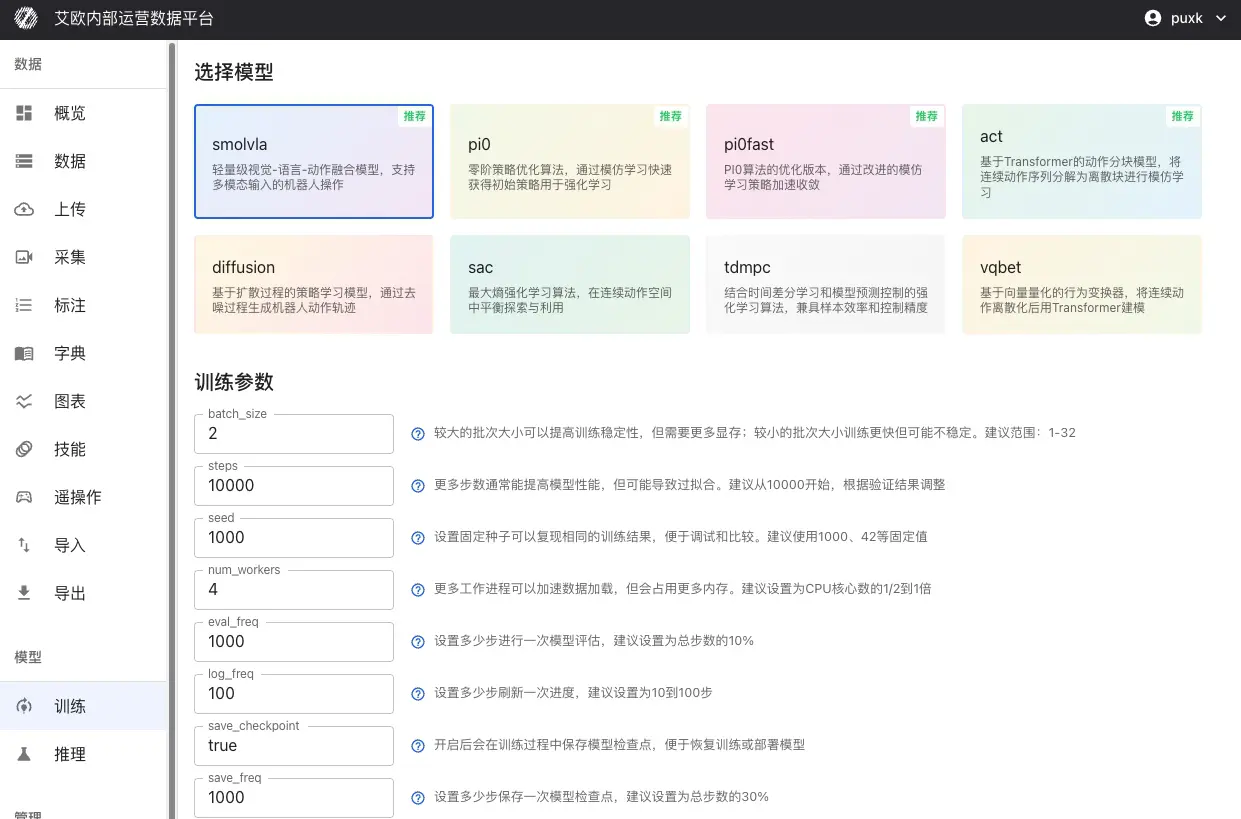
选择模型类型:
根据你的任务需求选择合适的模型:
| 任务类型 | 推荐模型 | 说明 |
|---|---|---|
| 理解自然语言指令 | SmolVLA、OpenVLA、Pi0 | 机器人可理解"请整理桌面"等指令并执行 |
| 模仿专家演示 | ACT、Pi0、Pi0.5 | 通过学习专家演示学习操作技能 |
| 复杂操作序列 | Diffusion Policy | 学习如组装、烹饪等需要精确控制的任务 |
| 动态环境适应 | SAC、TDMPC | 在动态环境中学习最优控制策略 |
选择计算资源:
-
本地 GPU:使用本地机房的 GPU 服务器
- 支持多 GPU 并行训练
- 实时显示 GPU 状态(显��存使用、温度、利用率)
- 适合大规模数据集和长时间训练
-
公有云资源:按需租赁云服务商的算力
- RunPod、AWS EC2/SageMaker、腾讯云、阿里云等
- 按实际训练时长计费
- 适合临时性训练任务或资源扩展需求

第 3 步:配置参数并开始训练
基础参数:
- batch_size(批次大小):建议范围 1-32,根据 GPU 显存调整
- steps(训练步数):建议从 10000 开始,根据验证结果调整
- eval_freq(评估频率):每多少步进行一次评估,建议为总步数的 10%
学习率设置:
- optimizer_lr(学习率):建议范围 1e-4 到 1e-5
- 过大导致训练不稳定,过小收敛慢
- 对于预训练模型微调,建议降低学习率(1e-5)
模型特定参数:
不同模型有各自的特定参数,系统会根据选择的模型显示对应的参数配置项。
配置完成后,点击"开始训练"即可。
支持的模型类型
平台支持机器人领域的主流学习模型,涵盖多种技术路线:
视觉-语言-动作模型
SmolVLA:轻量级多模态模型,将自然语言指令、视觉感知和机器人动作进行端到端学习。适合资源受限的场景,实时响应,资源友好。
OpenVLA:大规模预训练的视觉-语言-动作模型,支持复杂的场景理解和操作规划。适合需要强大理解能力的任务。
GR00T:多模态 GR00T 策略,支持视觉与语言联合规划,具备强大的通用操作能力。
模仿学习模型
ACT (Action Chunking Transformer):基于 Transformer 架构的动作分块模型,将连续动作序列分解为离散块进行学习。适合有专家演示数据的任务。
Pi0:Physical Intelligence 开源的旗舰 VLA 模型,通过 OpenPI 框架进行微调,具备极强的通用操作能力。详见:Pi0 微调指南
Pi0.5:增强版 Pi 模型,具有更好的泛化能力和开放世界适应性,支持更复杂的操作任务。
策略学习�模型
Diffusion Policy:基于扩散过程的策略学习,通过去噪过程生成连续的机器人动作轨迹。生成的动作平滑自然。
VQBET:向量量化行为变换器,将连续动作空间离散化后使用 Transformer 进行建模。
强化学习模型
SAC (Soft Actor-Critic):最大熵强化学习算法,在连续动作空间中平衡探索与利用。
TDMPC:时间差分模型预测控制,结合基于模型的规划和无模型的学习优势。
奖励学习模型
Reward Classifier:奖励函数学习模型,从标注数据学习奖励信号,用于强化学习训练。
训练工作流程
平台覆盖了从数据采集到模型部署的完整流程:
进阶使用
如何配置训练参数?
通用训练参数:
-
batch_size(批次大小):控制每次训练使用的样本数量
- 建议范围:1-32
- 较大批次提高训练稳定性但需要更多显存
- 根据 GPU 显存大小调整,避免显存溢出
-
steps(训练步数):模型训练的总步数
- 建议从 10000 开始
- 根据验证结果调整,避免过拟合或欠拟合
-
seed(随机种子):确保训练结果可重现性
- 建议使用 1000、42 等固定值
-
eval_freq(评估频率):每多少步进行一次模型评估
- 建议为总步数的 10%
- 评估过频繁会影响训练速度
-
save_freq(保存频率):每多少步保存一次检查点
- 建议为总步数的 30%
- 保存过频繁会占用存储空间
优化器参数:
-
optimizer_lr(学习率):控制参数更新幅度
- 建议范围:1e-4 到 1e-5
- 过大导致训练不稳定,过小收敛慢
- 对于预训练模型微调,建议降低学习率(1e-5)
-
optimizer_weight_decay(权重衰减):防止过拟合的正则化参数
- 建议范围:0.0 到 0.01
-
optimizer_grad_clip_norm(梯度裁剪阈值):防止梯度爆炸
- 建议设置为 1.0
模型特定参数:
不同模型支持��各自的特定参数:
ACT 模型:
chunk_size(动作块大小):一次预测的动作序列长度,建议范围 10-50n_action_steps(执行步数):实际执行的动作步数,通常等于 chunk_sizevision_backbone(视觉 backbone):可选 resnet18/34/50/101/152
Diffusion Policy 模型:
horizon(预测时间跨度):扩散模型的动作预测长度,建议 16num_inference_steps(推理步数):采样步数,建议 10
SmolVLA/OpenVLA 模型:
max_input_seq_len(最大输入序列长度):限制输入 token 数量,建议 256-512freeze_lm_head(冻结语言模型头部):微调时建议开启freeze_vision_encoder(冻结视觉编码器):微调时建议开启
💡 参数设置建议:
- 首次训练建议使用默认参数,确保训练正常进行
- 根据 GPU 显存大小调整 batch_size
- 对于预训练模型微调,建议降低学习率并冻结部分层
- 定期查看训练日志,根据损失曲线调整学习率
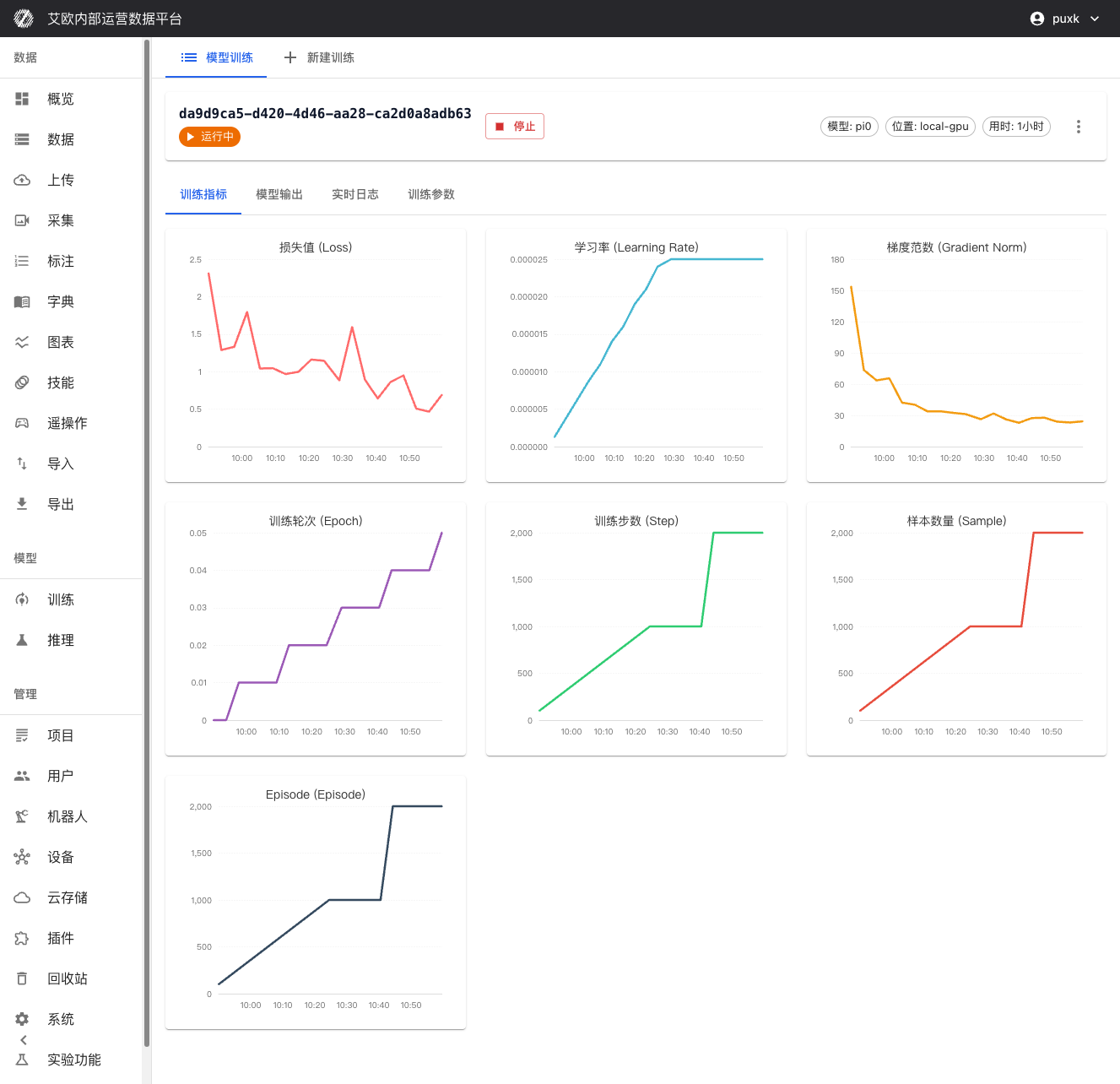
如何监控训练过程?
训练指标可视化:
在训练详情页面可以实时查看:
- 损失函数曲线:实时显示训练损失和验证损失,便于判断模型收敛情况
- 验证精度指标:显示模型在验证集上的性能表现
- 学习率变化:�可视化学习率调度策略的执行情况
- 训练进度:显示已完成步数、总步数、预计剩余时间等信息
资源监控:
- GPU 利用率、显存占用实时监控
- CPU 和内存使用情况跟踪
- 网络 IO 和磁盘 IO 监控(如适用)
系统日志:
- 详细的训练日志记录,包括每个训练步骤的详细信息
- 错误和警告信息实时显示,便于快速定位问题
- 支持日志实时流式传输,可随时查看最新训练状态
如何管理训练任务?
进程控制:
- 暂停训练:临时暂停训练任务,保留当前进度
- 恢复训练:从暂停点恢复训练,无缝继续
- 停止训练:安全停止训练任务,保存当前检查点
- 重启训练:重新启动训练任务
检查点管理:
训练过程中和训练完成后,所有保存的检查点都会在训练详情页面显示:
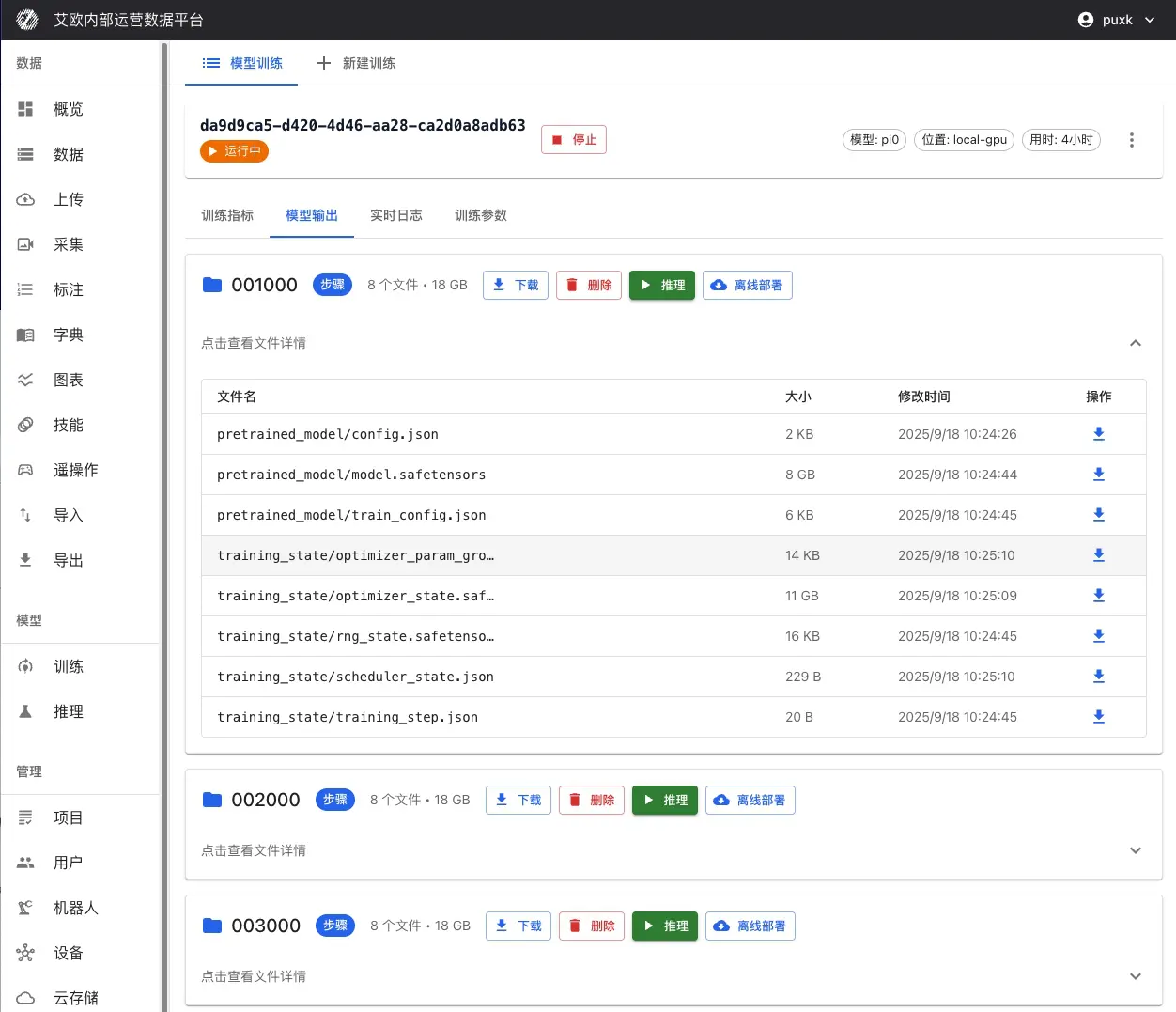
检查点信息:
- 检查点名称:自动生成或自定义的检�查点名称(如"step_1000"、"last"等)
- 训练步数:该检查点对应的训练步数
- 保存时间:检查点的保存时间戳
- 文件大小:检查点文件的大小
- 性能指标:该检查点在验证集上的性能表现
检查点操作:
- 查看详情:查看检查点的详细信息和评估结果
- 下载检查点:下载检查点文件到本地,用于离线部署或进一步分析
- 标记为最佳:将性能最好的检查点标记为最佳模型
- 部署推理:直接从检查点一键部署为推理服务
检查点说明:
- last:最后一个保存的检查点,通常是最新的模型状态
- best:在验证集上表现最好的检查点,通常用于生产部署
- step_xxx:按训练步数保存的检查点,可用于分析训练过程
任务操作:
- 参数调整:训练过程中可查看和调整部分训练参数(需谨慎使用)
- 任务复制:基于成功的训练配置快速创建新任务,复用最佳配置
- 任务删除:删除不需要的训练任务,释放存储空�间
如何从失败的训练中恢复?
如果训练任务失败:
- 查看错误信息:在训练详情页面查看详细的错误日志
- 分析失败原因:常见原因包括:
- 显存不足:降低 batch_size 或使用更大的 GPU
- 数据格式错误:检查数据格式是否符合要求
- 参数配置错误:检查参数设置是否合理
- 修改参数:在训练详情页面点击"修改参数",调整配置后重新训练
- 从检查点恢复:如果之前保存了检查点,可以从检查点继续训练
💡 建议:定期保存检查点,避免训练中断导致数据丢失。
训练配额管理
什么是训练配额?
训练配额用于控制资源使用,确保系统资源合理分配。
配额类型:
- 用户配额:每个用户有独立的训练配额限制
- 全局配额:系统级别的总配额限制(管理员配置)
- 配额统计:实时显示�已使用配额和剩余配额
配额显示:
- 训练页面显示当前用户的配额使用情况
- 显示已使用数量和总配额限制
- 超出配额时无法创建新的训练任务
配额管理(管理员):
管理员可以:
- 查看所有用户的训练配额使用情况
- 配置全局训练配额限制
- 调整单个用户的配额
常见问题
如何选择合适的模型?
选择建议:
- 确定任务类型:是理解指令、模仿学习还是强化学习?
- 查看模型说明:每个模型都有详细说明,了解适用场景
- 参考应用案例:查看模型的应用案例,选择最接近你任务的模型
- 从小规模开始:先用小数据集测试,确认模型效果后再大规模训练
训练需要多长时间?
时间估算:
训练时间取决于:
- 数据量:数据越多,训练时间越长
- 模型复杂度:复杂�模型需要更长时间
- 计算资源:GPU 性能越好,训练越快
- 训练步数:步数越多,训练时间越长
一般情况:
- 小数据集(1000 条以下):1-3 小时
- 中等数据集(1000-10000 条):3-12 小时
- 大数据集(10000 条以上):12 小时以上
优化建议:
- 使用多 GPU 并行训练可以显著缩短时间
- 适当降低 batch_size 可以加快单步速度
- 使用更强大的 GPU 可以提升训练速度
如何判断训练是否正常?
正常训练的指标:
- 损失下降:训练损失应该逐渐下降
- 验证指标提升:验证集上的性能应该逐渐提升
- 资源稳定:GPU 利用率应该保持稳定,不会频繁波动
- 无错误日志:日志中不应该有大量错误信息
异常情况:
- 损失不下降:可能是学习率过大或过小,需要调整
- 损失震荡:可能是 batch_size 太小,需要增大
- 显存溢出:需要降低 batch_size 或使用更大的 GPU
- 训练卡住:检查数据加载是否正常,网络是否稳定
训练失败怎么办?
处理步骤:
- 查看错误日志:在训练详情页面查看详细的错误信息
- 分析失败原因:根据错误信息判断是数据问题、参数问题还是资源问题
- 修复问题:根据原因采取相应措施
- 重新训练:修复后重新创建训练任务
常见错误:
- 显存不足:降低 batch_size 或使用更大的 GPU
- 数据格式错误:检查数据格式是否符合要求
- 参数配置错误:检查参数设置是否合理
- 网络问题:检查网络连接是否稳定
相关功能
完成模型训练后,你可能还需要: