VR APP使用说明
PICO系统设置
安全边界设置
进入系统设置-安全防护-设置安全边界,点击去设置,然后参考视频内容进行设置。
Wi-Fi连接
在VR系统里,点击右下角Wi-Fi图标,进入网络设置,连接TeleSuit对应的Wi-Fi


无线投屏





开发者模式
进入设置界面 > 关于本机,连续点击 软件版本号(约 20 次),直到出现开发者选项提示。

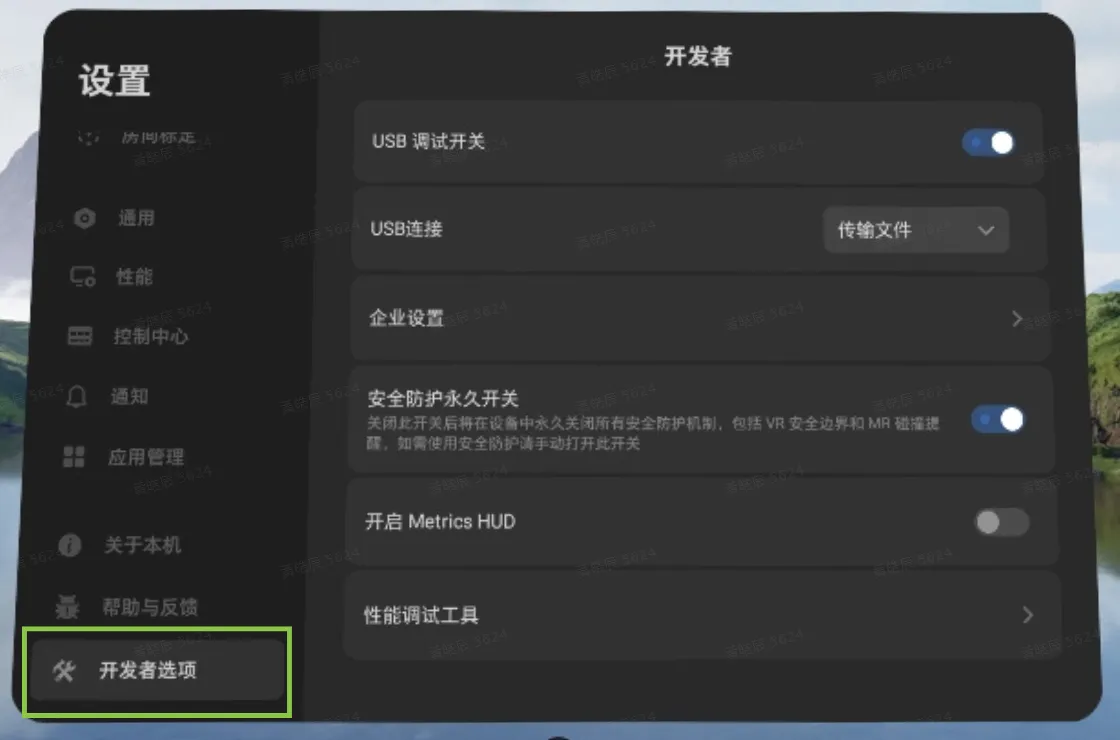
性能模式开启
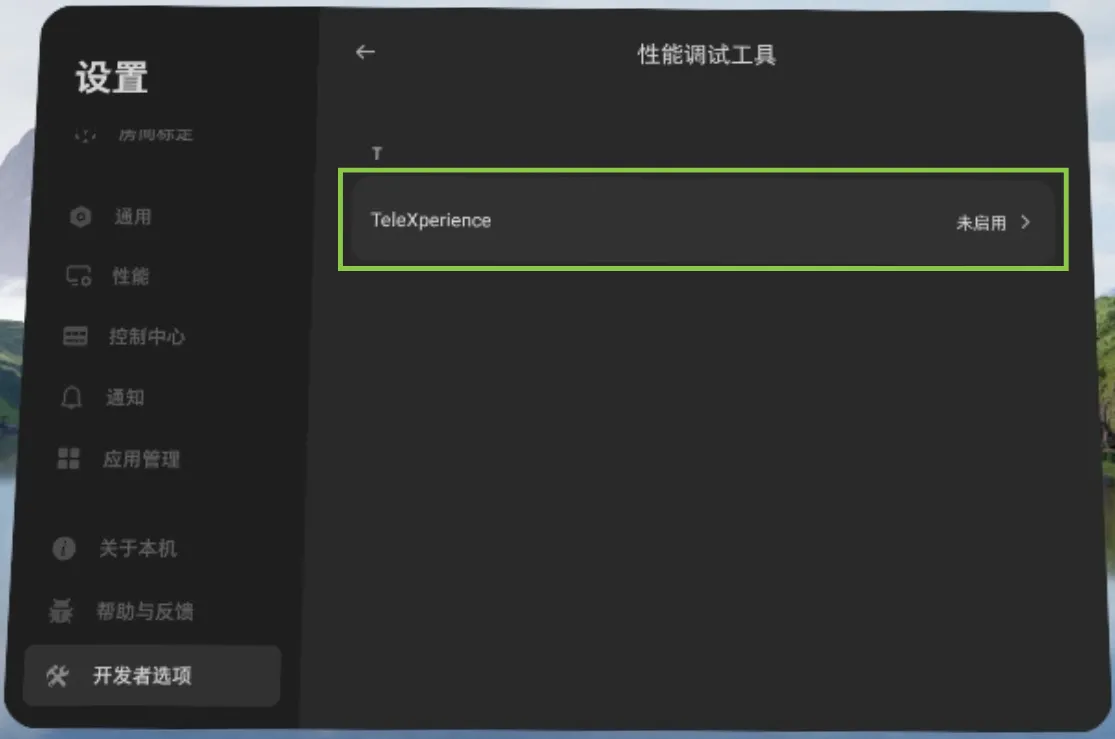
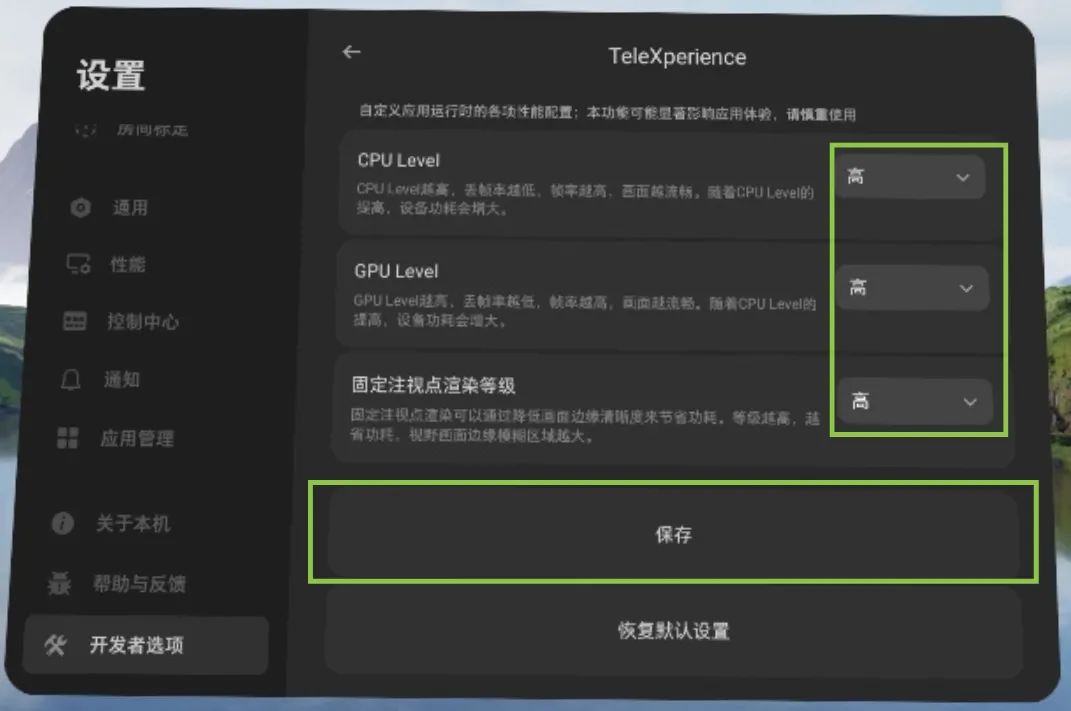
进入开发者选项 > 性能调试工具,同意风险告知,选择TeleXperience,按以下设置优化画质:
- 将刷新率调整为90Hz。
- 分辨率设置为1.5倍或2倍。
- 调整CPU/GPU以及固定注视点渲染等级为高。
此配置可大幅提升画质,但会增加设备功耗。
注意: 若应用重装需重新进行设置;企业版 PICO 需升级至系统版本 5.11.3.U 或更高才支持。
界面�总览
启动场景
开机动画及安全须知:进入场景后,系统会显示安全须知,默认勾选“已同意”。在 3 秒倒计时结束后,您可以按右手柄的 A 键同意并进入主操控场景;如果取消勾选“已同意”,按 A 键将退出应用程序。
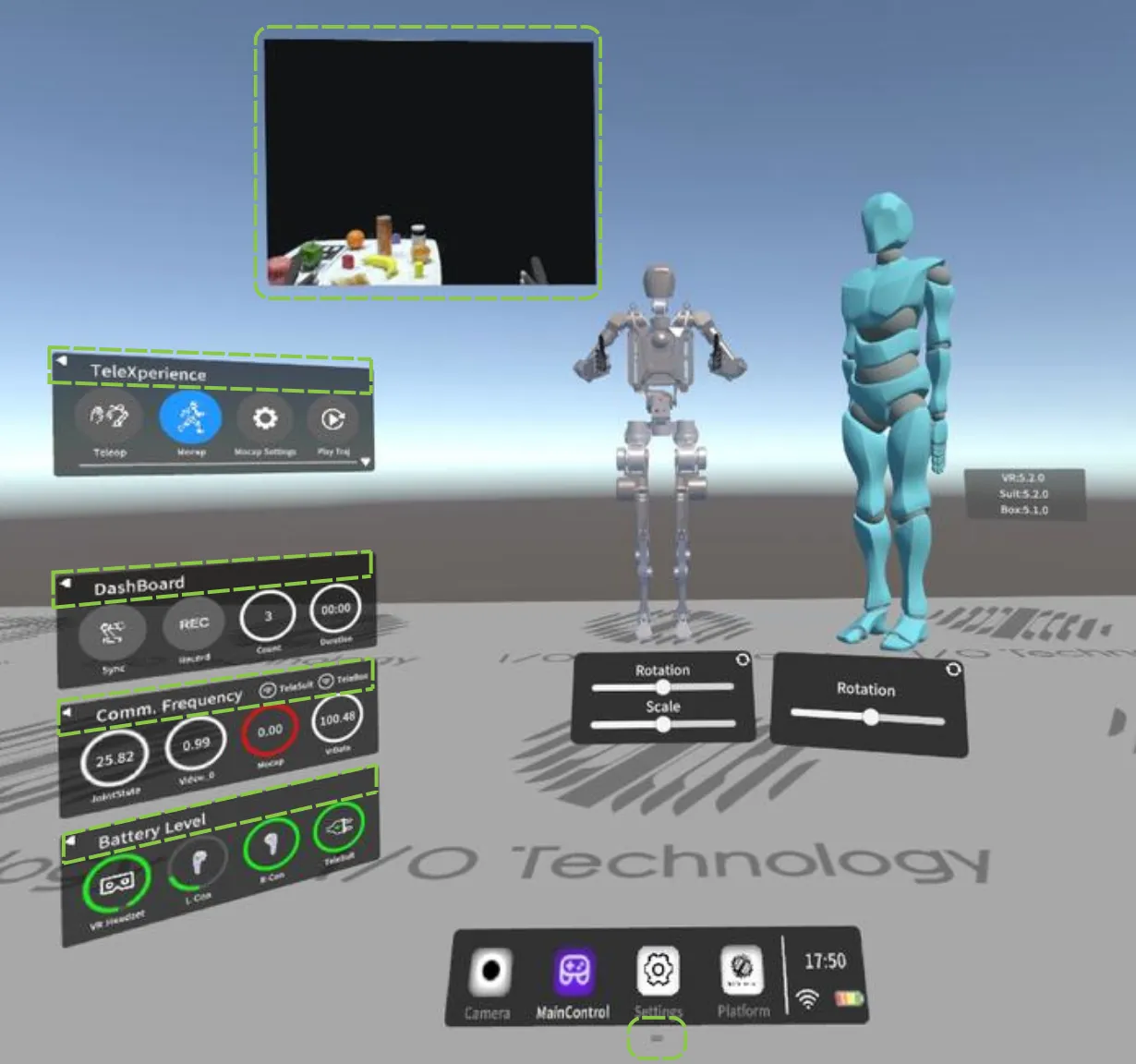
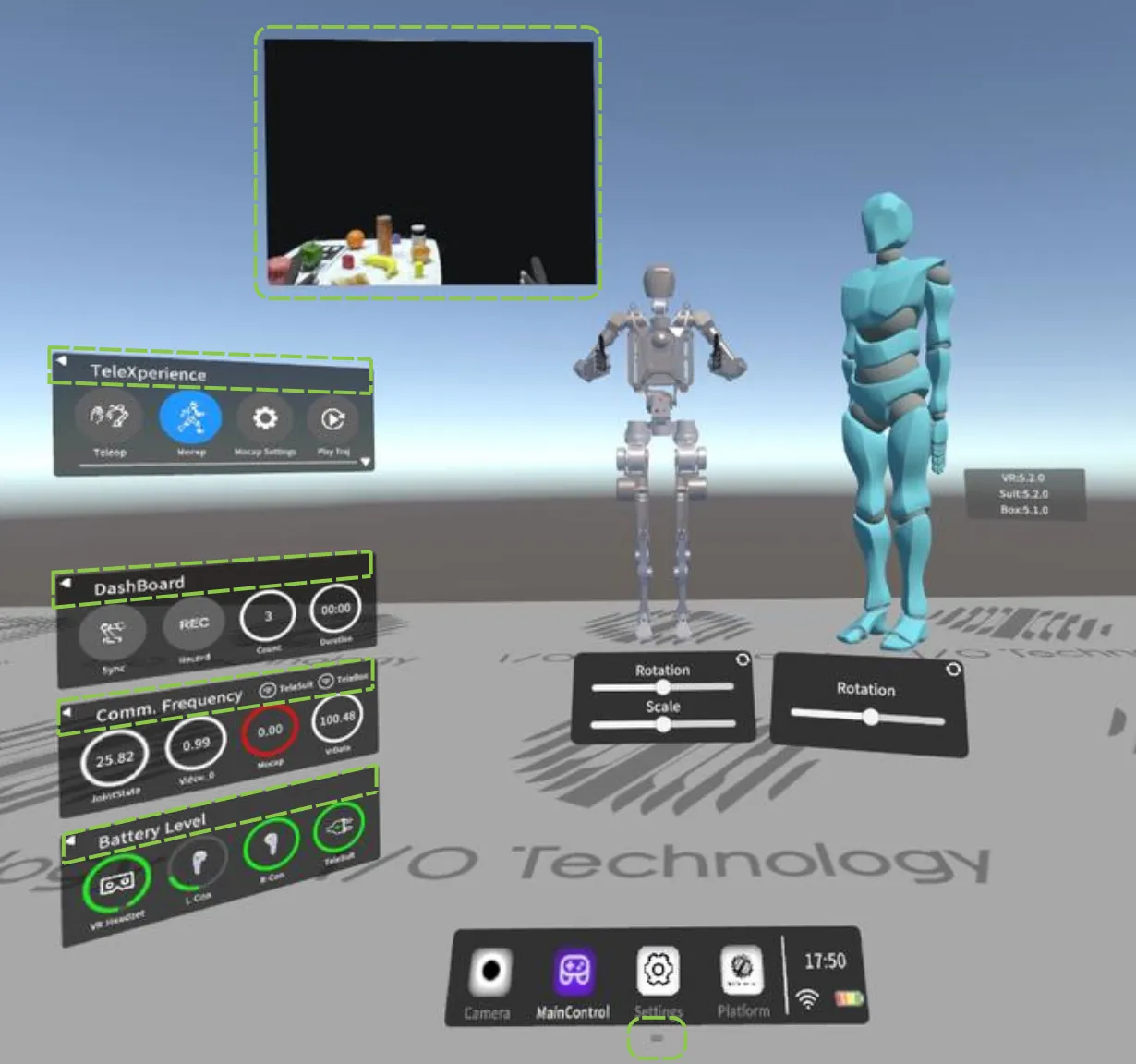
主操控场景
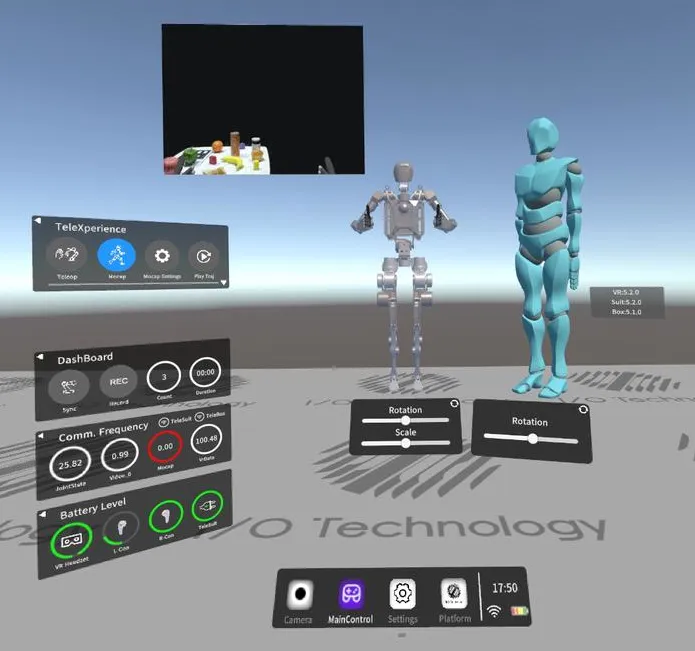
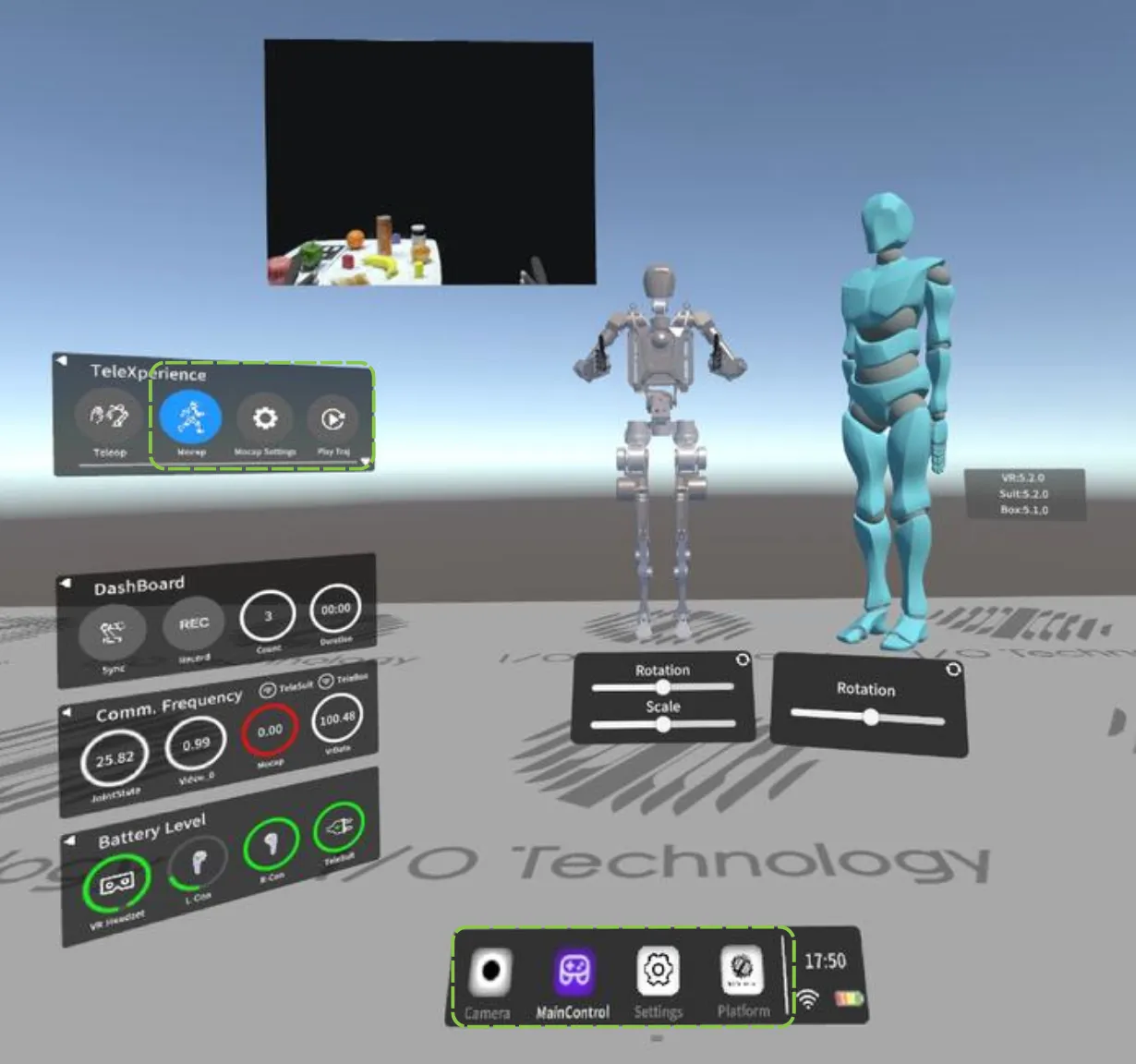
面板介绍
docker导航栏

- Camera:相机设置面板开关
- MainControl:系统主面板开关
- Setting: 系统设置面板开关
- Platform: 遥操作平台面板��开关
注意: Camera、Setting和Platform三个窗口为互斥窗口,始终共享同一层级,无法同时显示。
主控中心面板
主控中心面板包含TeleXperience, Dashboard, Comm.Frequency, Battery Level四个子面板
TeleXperience面板
用于系统控制。
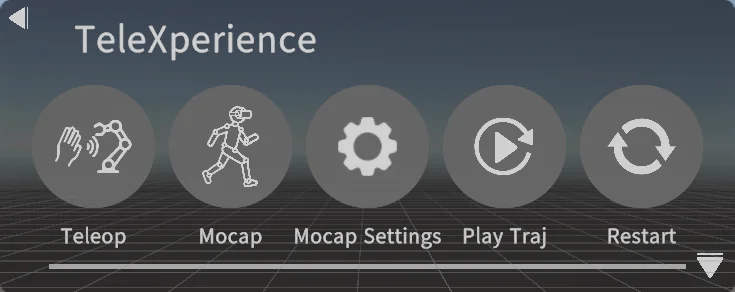
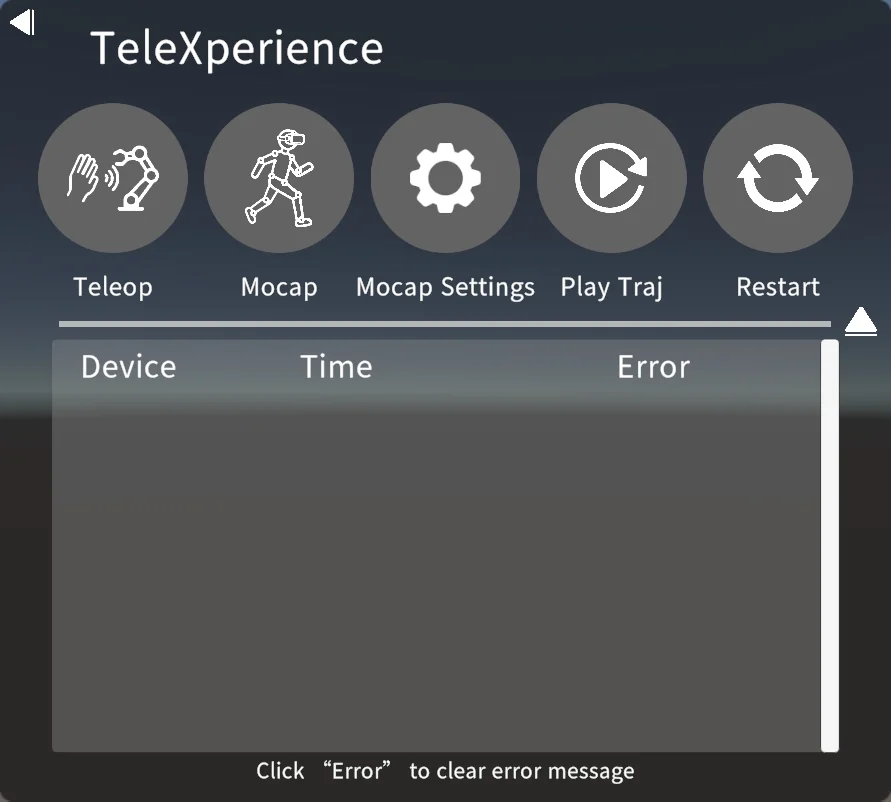
错误面板展开:普通状态下点击▽图标可以展开面板,显示系统错误信息。
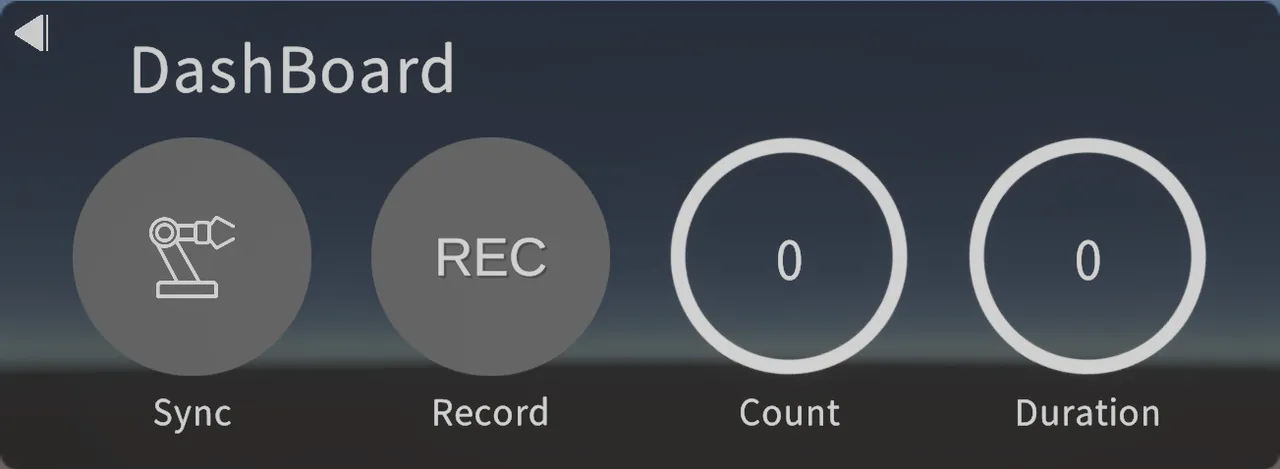
Dashboard面板
用于遥操作相关功能状态显示。
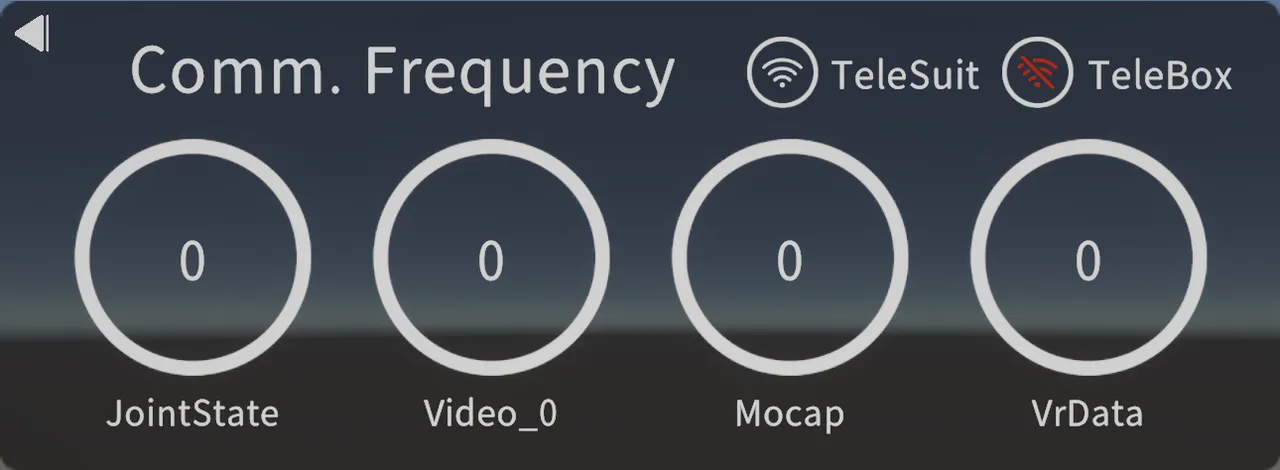
Comm.Frequency面板
用于与TeleSuit和TeleBox的网络连接检测,并显示检测到的各消息的通信频率。
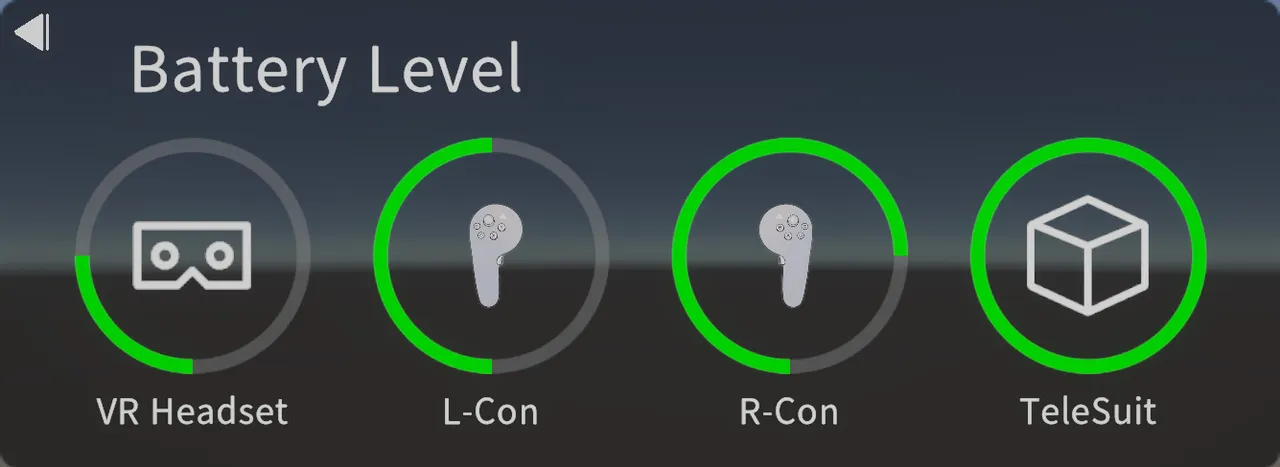
Battery Level面板
用于显示系统各个模块的电量信息。
子面板状态说明:
- 普通状态:正常显示的状态,子面板内容正常展示。
- 关闭状态:点击MainControl图标后,子面板关闭并不再显示的状态。
- 跟随手部状态:子面板仅在抬手时可见,随着手部动作出现或消失。
- 隐藏状态(跟随手部状态下):在跟随手部状态时,点击menu按钮后,子面板被隐藏且不再显示的状态。
子面板状态切换按钮:点击◁按钮可以让子面板在普通状态和跟随手部状态之间切换。
手部菜单
触发方式
- 抬起左手,让视野中的手指扳机正对面部,左下角会出现蓝色按钮,作为手部菜单的开关。
- 若首次进入app,默认为隐藏状态(跟随手部状态下),先点击Menu按钮,进入跟随手部状态。
- 保持手柄与视线夹角在30°到45°之间,手部状态下的面板即会出现。

mocap设置面板
点击mocap setting图标,打开/关闭动捕设置面板。



轨迹回放面板
点击play traj图标,打开/关闭轨迹回放面板。

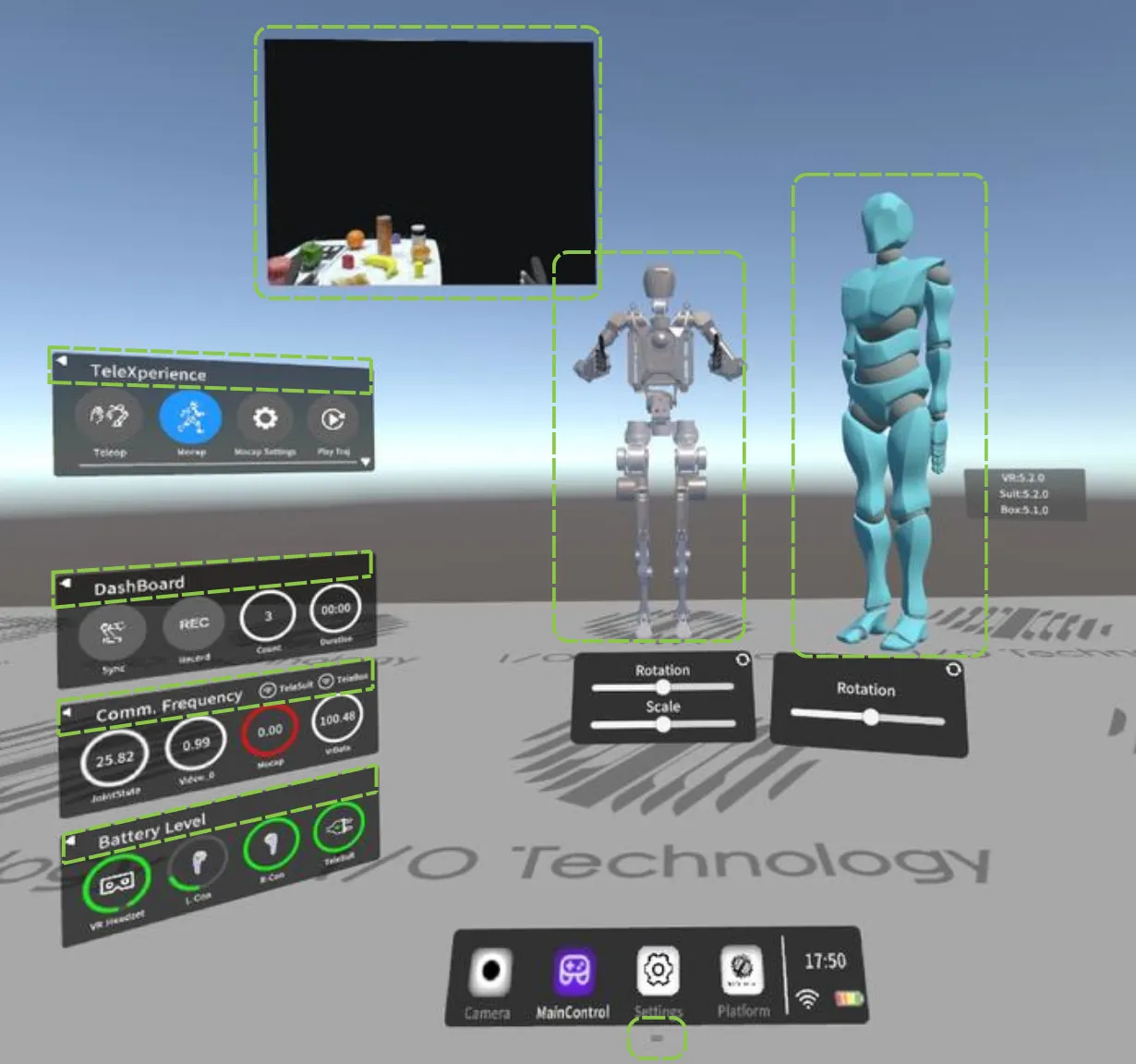
机器人面板
当系统与TeleBox通信正常时,机器人面板会自动显示。
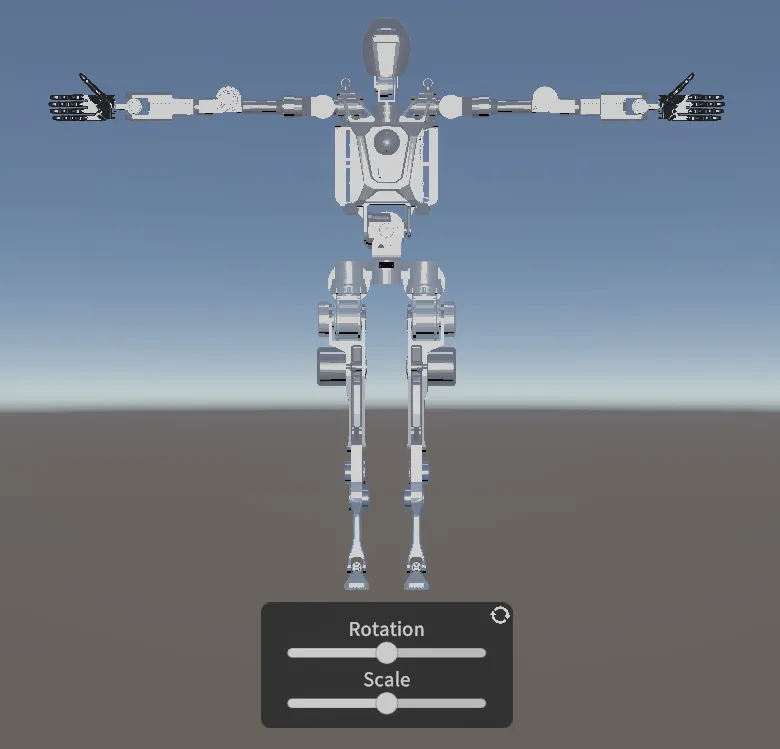
动捕小人面板
当Mocap成功开启时,动捕小人面板会自动显示。

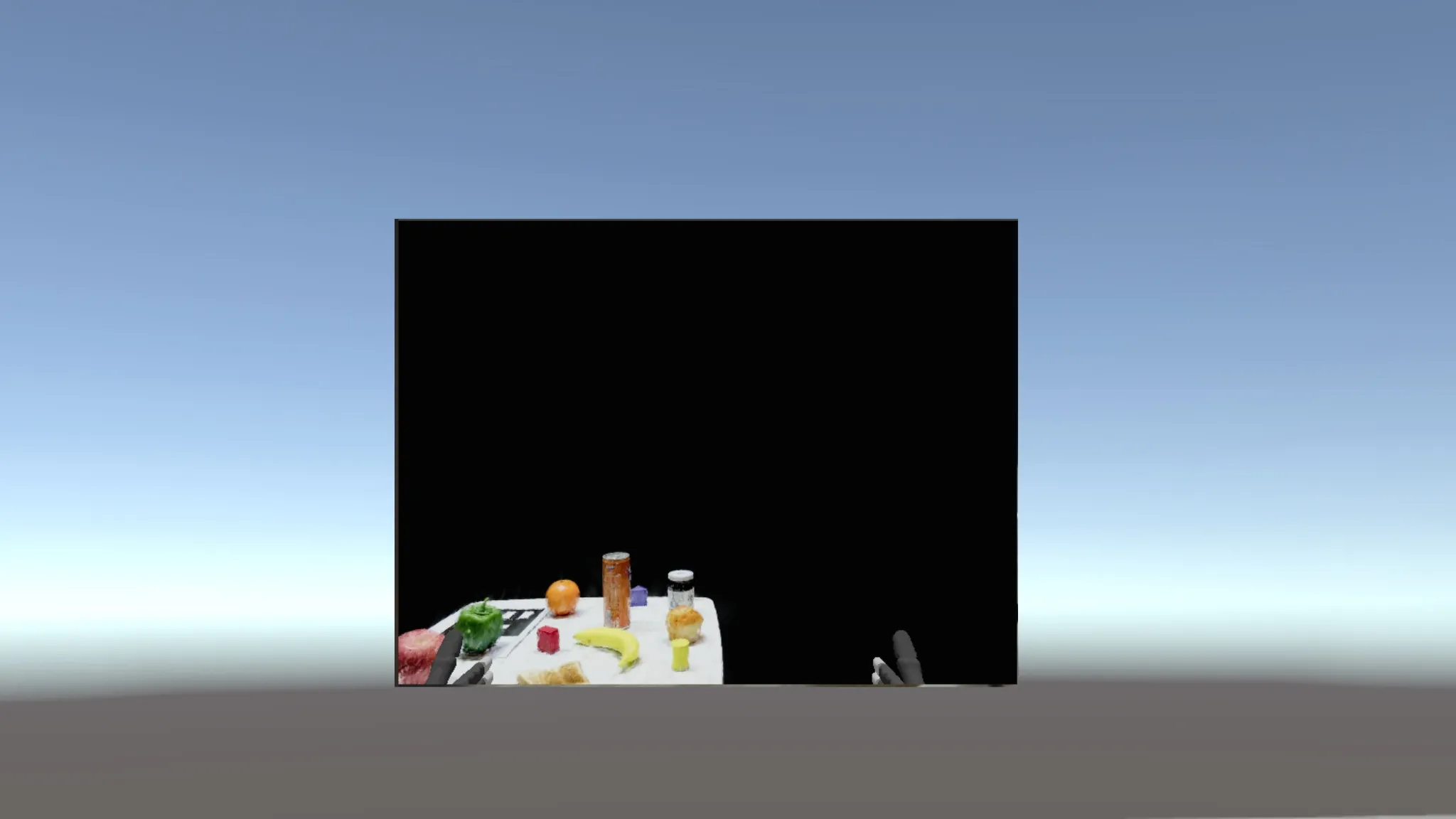
相机面板
平台面板
交互方式
面板唤出和收回
点击图标唤出面板,再次点击对应图标收回面板。
面板拖拽
中指扳机选中面板的有效区域后进行拖拽。
- 适用范围
- 动作演示
面板距离调整
中指扳机选中面板的有效区域后遥杆前后推动控制面板远近。
- 适用范围
- 动作演示
面板朝向调整
中指扳机选中面板的有效区域后遥杆左右推动控制面板朝向。
- 适用范围
- 动作演示
面板重置
长按对应图标可将当前面板位置和大小重置为默认状态。
- 相机面板重置:长按 Camera图标
- 系统主面板重置:长按 MainControl图标。
- 机器人面板重置:长按 机器人面板中的🔄图标。
- 动捕小人面板重置:长按 动捕小人面板中的🔄图标。
面板缩放
将射线移动至面板窗口的四个角时,会出现白色球体锚点。按住中指扳机并拖拽锚点即可进行缩放操作。
注意:目前仅相机面板支持此操作。
动捕功能
动捕设备选择
点击 mocap setting 按钮打开动捕设置面板,点击左侧Device List按钮,右侧列表将显示当前可用的设备。
-
注意:本功能仅在动捕未开启时可用。如果动捕已启动,将无法进行设备选择操作。
-
您可以在支持的设备组合范围内自由勾选。如果选择的设备组合非法,系统将自动回退到最后一次正确配置。
-
支持的设备组合如下:
- UPPER_BODY
- UPPER_BODY + LOWER_BODY
- UPPER_BODY + LOWER_BODY + GLOVE
- UPPER_BODY + LOWER_BODY + EXOSKELETON_GLOVE
- UPPER_BODY + GLOVE
- UPPER_BODY + EXOSKELETON_GLOVE
- GLOVE
- EXOSKELETON_GLOVE
- EXOSKELETON_GLOVE + WIRELESS_MODULE
动捕标定
在动捕设置面板内,点击左侧Pose Calib 或VR Calib 按钮。
- 注意:本功能仅在动捕开启时可用。
动捕姿态标定
参考以下视频学习标定流程和动作要点。
点击BODYCalib按钮,系统根据选择的组合自动开始标定流程。
VR动捕联合标定-VRHead
参考以下视频学习标定流程和动作要点。
点击CalibVRHeader按钮,系统自动开始标定流程。
VR动捕联合标定-VRController
参考以下视频学习标定流程和动作要点。
点击CalibVRController按钮,系统自动开始标定流程。
动捕标定辅助动画
- 默认开启。勾选Guided Animation后系统将在标定各阶段播放对应的动画,作为辅助提示。具体的动作细节请参照各标定流程的教学视频。
外骨骼手套可视化
在外骨骼手套启用和已经开启动捕的情况下,使用手柄食指扳机双击动捕小人上半身,可打开或关闭外骨骼手套可视化功能。
- 注意:在外骨骼手套可视化功能开启时,关闭动捕会同时关闭可视化。下次使用需再次双击动捕小人上半身,开启外骨骼手套可视化功能。
控制功能
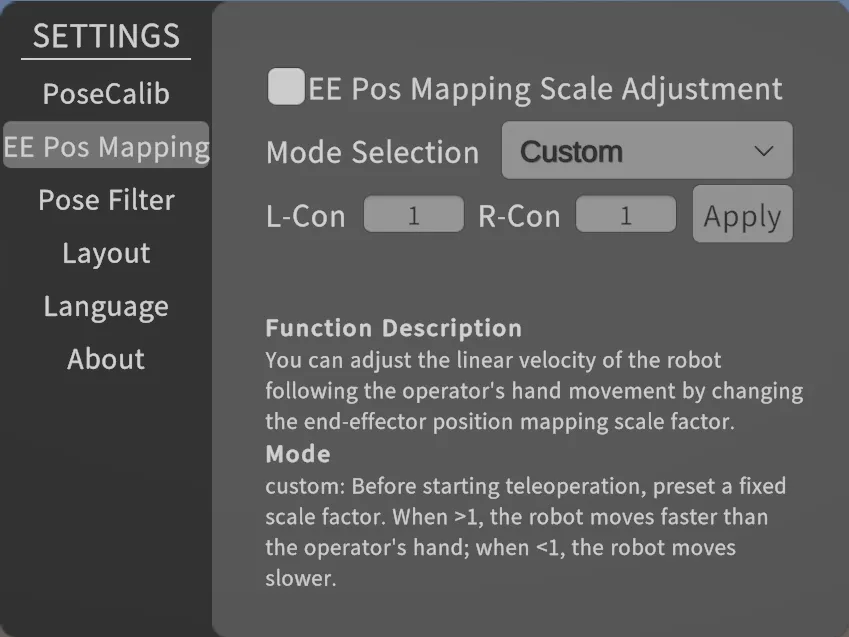
末端位置映射比例调节
默认关闭。 该功能允许通过调节末端位置映射的比例系数,调整机器人在跟随操作者手部运动时的线速度。系统当前提供一种模式:Custom,可在系统设置面板中开启。
- Custom 模式:比例系数(scale)为用户自定义的固定数值。输入期望的系数后,点击Apply按钮即可生效。
- 在开始遥操作前,需预先设定比例系数:
- 当系数 > 1 时,机器人运动速度大于手部运动。
- 当系数 < 1 时,机器人运动速度小于手部运动。
相机功能
根据TeleBox的Dashboard中的相机配置,相机设置面板会显示对应数量的相机窗口。每个窗口底部带有单选框,勾选后即可显示出对应的相机面板。
组件布局功能
- 在系统设置面板中,点击Layout,点击Add New可将当前面板位置保存为布局,最多可保存 5 个布局。
- 可通过下拉列表选择已保存的布局模板,点击Delete可移除当前模板,点击Apply即可应用选中的布局。
- 点击Reset按钮,可一键还原所有组件布局为默认状态。
注意:若当前模板中的相机数量与实际相机数量不一致,不会执行布局应用操作,用户需选择数量匹配的模板。
状态监控功能
电池电量监控

- VR Headset: 显示头显电池电量。
- L-Con: 显示左手柄连接状态与剩余电量。
- R-Con: 显示右手柄连接状态与剩余电量。
- TeleSuit: 显示TeleSuit电池电量或TeleSuit直流供电状态。
通信监控
- TeleSuit: 显示与TeleSuit的连接情况。
- TeleBox: 显示与TeleBox的连接情况。
- JointState: 接收到的机器人状态信息的通信频率。
- Video_0: 接收到的摄像头数据的通信频率。
- Mocap: 接收到的Mocap数据的通信频率。
- VrData: 发送的VrData数据的通信频率。
注意:点击video_0可切换为同时显示多路相机的通讯频率。
功能状态显示
- Sync: 显示遥操作同步状态。
- Record: 显示遥操作录制状态。
- Count: 显示系统中已录制的数据条目数。
- Duration: 显示当前录制数据的已录制时长。
网络断连提醒
- 在系统运行期间,将自动监测与 TeleSuit(10.42.0.2)的通讯连接状态
- 如果与Suit的网络连接中断,系统会弹出网络连接失败面板。该面板会一直显示,直到网络恢��复为止。

数据回放
点击Play Traj按钮,打开回放面板,通过下拉菜单选择需要回放的数据包,点击Confirm开始回放,再次点击Play Traj按钮即可退出。
通透模式
- 开启后,系统将停止渲染虚拟内容,只显示真实世界的相机画面。
- 快速启动/退出:同时按下左右摇杆按钮即可启动通透模式,再次按下即可退出。
安全功能
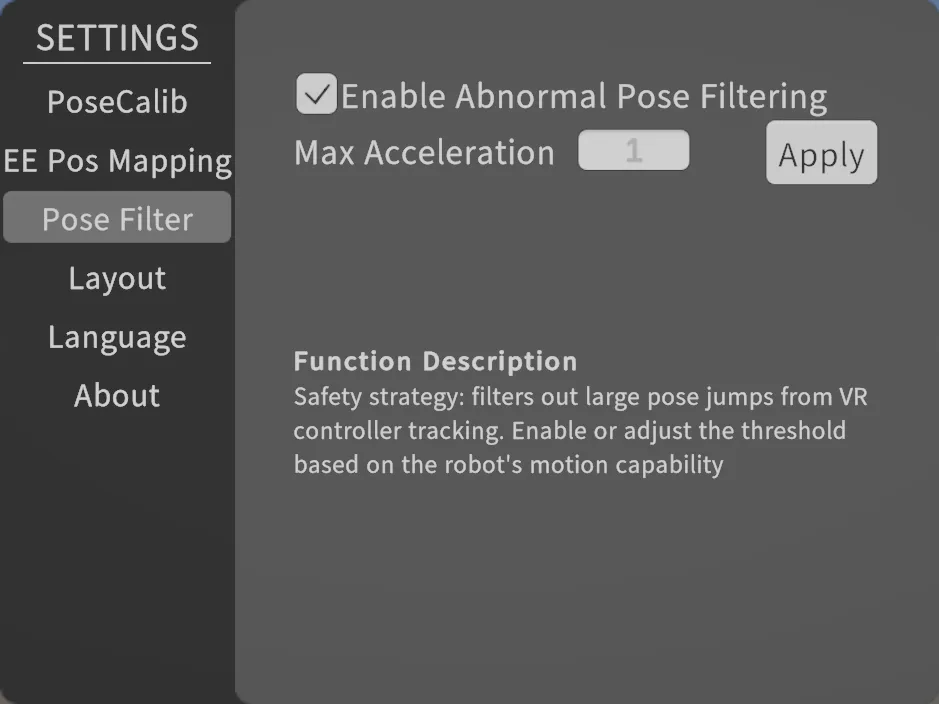
手柄异常位姿过滤
默认开启。
为提升系统安全性,该功能可对 VR 手柄位姿识别结果中的异常大幅度跳变进行滤除。
用户可根据机器人的实际运动性能选择是否启用该功能,并设置过滤的阈值参数,以适应不同场景需求。
输入期望的阈值参数后,点击Apply按钮即可生效。
手柄震动反馈
当接收到震动数据时,手柄会产生震动。传入的数据主要用于控制震动的幅度,具体参数如下:
- 震动幅度:收到的数据值乘以 0.8 作为实际震动幅度
- 震动持续时间:500 毫秒
- 震动频率:100 Hz
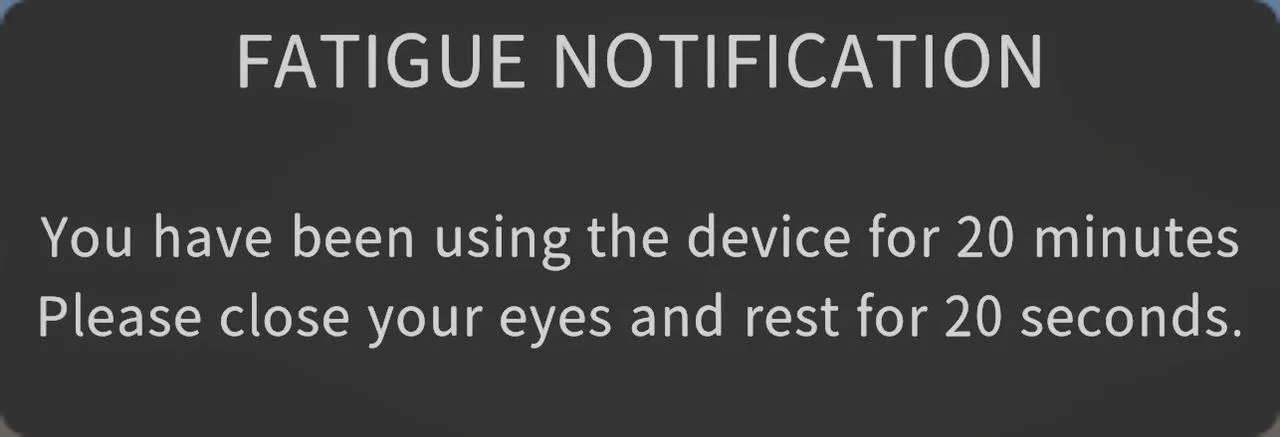
疲劳检测
当系统运行时间达到指定阈值(20 分钟、40 分钟或 60 分钟)时,系统会自动弹出疲劳检测面板,以提醒用户进行状态检查并适当休息。
低电量检测
默认开启。
- 在程序运行期间,若VR或TeleSuit电量低于20%,系统会触发一次低电量提示。
- 若两者中任一设备的电量低于5%,启动同步后会系统自动关闭同步功能。
- 若需关闭该功能,可在系统设置面板中PoseCalib页中取消勾选Low Power Warning选项。
其它
沉浸模式
开启后,相机面板可随头部运动自动跟随。 可设置沉浸模式下是否显示机器人和动捕小人。
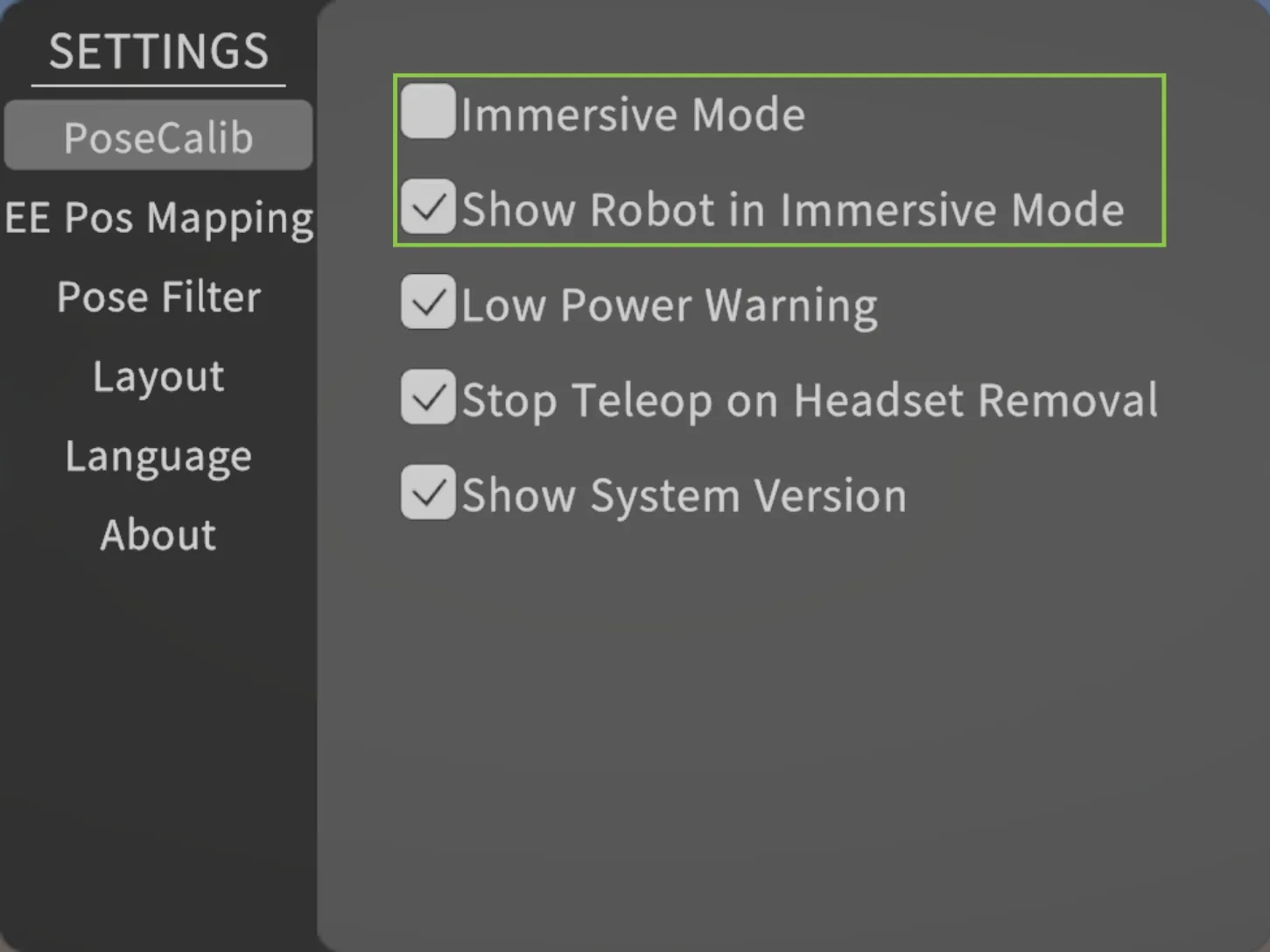
系统版本显示
默认开启。
在场景右上方自动显示如下信息:
- vr版本
- suit版本
- box版本
错误提示未读提醒
- MainControl面板关闭时,若有错误,将在 docker栏中MainControl 图标的右上角显示未读消息条目数
- 打开状态面板后将自动清空未读数目
注意: 未读提醒仅在面板关闭状态下有效,不包括面板被隐藏或最小化的情况。
Config 切换监测
当检测到重新应用配置 (Config) 操作后,系统将执行以下步骤:
- 重新拉取配置文件。
- 重启 WebSocket 通讯。
- 重新加载机器人模型和相机面板。
语言切换
系统目前支持中文和英文两种语言。默认语言为英文,用户可在系统设置面板的Language页中切换语言。